Download
1 / 14
170 likes | 460 Views
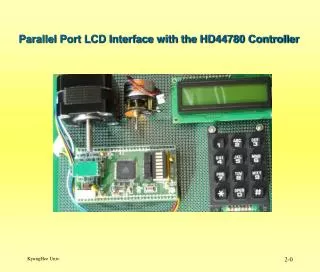
……computer controlled robot. WHY PARALLEL PORT?. The simplest computer controlled robot Requires only basic programming skills in C to start off with Can take inputs from your robot and accordingly give output signals Circuitry is simple. Parallel Port. The Pins. Data Register:

E N D
WHY PARALLEL PORT? • The simplest computer controlled robot • Requires only basic programming skills in C to start off with • Can take inputs from your robot and accordingly give output signals • Circuitry is simple
The Pins Data Register: • This is the register that allows the user to write values into the port. Status Register (Pins): • This port acts like a reader and it has 5 pins for inputs. Control Register (Pins): • This register can be used in both ways: it enables a user to write values to the outside world, as well as read values
What is High and Low? • A Parallel port uses Transistor Transistor Logic. • A high signal i.e.1 means the output of the transistor arrangement is from 2.2V to 5V. • A low signal i.e.0 means the output of the transistor arrangement is from 0.0V to 0.8V.
Motor Driver • It acts as an interface between the port and motor. • The output of the parallel port is too low to drive a motor. • The motor driver receives signals(1 or 0) from the port and gives an output to the motor.
Programming #include<stdio.h> #include <dos.h> void main(void) { outportb(0x378,0xFF); } 0xFF=1111 1111 • outportb(0x378,0x00); ---------STOP MOTOR • outportb(0x378,0x03);---------MOVE MOTOR(Break!)) • outportb(0x378,0x01);---------MOVE MOTOR(CCW) • outportb(0x378,0x02);---------MOVE MOTOR(CW) .
Finding the address • Go to Start > Control Panel > System > ‘Hardware’ Tab > Click on Device Manager > Look for ‘Ports’ in the device list > Double click on LPT1 > Click on the ‘Resources’ Tab. • Here you can see the starting address of I/O Range. • It is usually 0x378 or 0x278
Materials Required: 1 parallel port Male connector 1 DC Motor 1 Motor Driver [L293D] 1 5V regulator [7805] Warning: Your Parallel port is not designed to handle more than 5V.
Useful Software and Links • Parmon (www.geekhideout.com/downloads/parmon.zip) • www.machinegrid.com