Download
1 / 29
300 likes | 338 Views
CHAPTER 3 Z-TRANSFORMS. PREPARED BY : DEEPAK KUMAR ROUT SYNERGY. Chapter3. THE z-TRANSFORM. 3.1 z-Transform 3.2 Properties of the Region of Convergence for the z-Transform 3.3 The Inverse z-Transform 3.4 z-Transform Properties 3.5 Stability, Causality - Illustration

E N D
CHAPTER 3Z-TRANSFORMS • PREPARED BY : • DEEPAK KUMAR ROUT • SYNERGY
Chapter3. THE z-TRANSFORM 3.1 z-Transform 3.2 Properties of the Region of Convergence for the z-Transform 3.3 The Inverse z-Transform 3.4 z-Transform Properties 3.5 Stability, Causality - Illustration 3.6 LTI System and z-Transform-Frequency Characteristics 3.7 z-transform vs. Laplace Transform
3.1 z-Transform Background-Definition - Fourier transform extracts the essence of x[n] but is limited in the sense that it can handle stable systems only. converges, or exists if i.e., stable system Fourier Transform converges - So, we want to extend it such that it can be used as a tool to analyze digital systems in general.
converges if Let then it converges if The condition for convergence is relaxed! (e.g.)
- This implies that can handle some systems that cannot due to divergence. - Therefore we define z-transform to be Representing the condition for convergence of in terms of region of convergence ROC. (e.g.) in case x[n] = 2nu[n] exists for |r|>2. So, ROC is |z| = |rejw|>2.
is - In terms of , is a special case In general, if Where , or
: , or (e.g.)
, (e.g.) Two - sided sequence
Some Common z-Transforms (1) (2) (3) (4) (5) (6) (7)
(8) (9) (10) (11) (12) (13)
3.2 Properties of (1) in general (2) absolutely converges (3) cannot contain a pole (4) FIR sequence entire z plane, may be except for 0 or (5) Right-sided sequence outward of the outermost pole (6) Left-sided sequence inward from the innermost pole (7) Two-sided sequence a ring in between two adjacent rings (8) is a connected region
(e.g.) If x[n] is a sum of 3 sequences whose poles are a, b, c respectively, There exist A possible s as shown below All left-sided All right-sided two left-sided two right-sided
3.3 Inverse z-Transform (1) Inspection method (2) Partial Fraction Expansion (3) Power Series Expansion omitted (e.g.) power series expansion
3.4 z-Transform Properties (1) Linearity (2) Time shifting (e.g.) and delay -1
(3) Multiplication by an Exponential Sequence (e.g.) (e.g.)
(4) Differentiation of X(z) (e.g.)
(5) Conjugation of Complex Sequence (6) Time-Reversal (7) Convolution-Integration (8) Initial Value Theorem
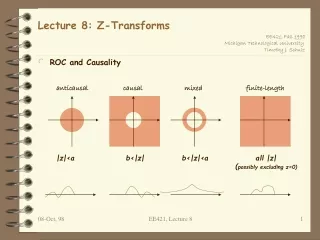
3.5 Stability , Causality - Illustration (1) ① Causal ② Stable ① Outward ② UC RoC RoC :
(2) ① Anti Causal ② Unstable ① Inward ② UC RoC RoC :
(3) • ① Causal • ② Unstable • RoC : • ① Outward • ② UC RoC
(4) • ① Anti Causal • ② Stable • ① Inward • ② UC RoC • What do you find? RoC : 1 2
3.6 LTI System and z-Transform - Frequency Characteristics - Convolution-Multiplication - System Function
- Frequency Characteristics (Response) • Magnitude Phase • Char. Char. • -(e.g)
Infinite Length vs. Finite Length (1) a 1 RoC : |z|>a
(2) a 1 RoC : z 0
3.7 z-Transform vs. Laplace Transform x(t) y(t) x[n] y[n] <Laplace-Transform> <z-Transform> Stable : RoC includes Stable : RoC includes j-axis UC Causal : RoC Rightward Causal : RoC outward AnalogLTI DigitalLTI s-plane z-plane