Download
1 / 18
180 likes | 334 Views
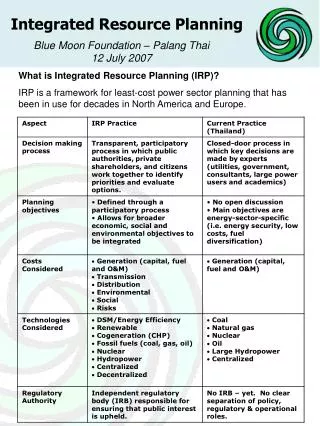
Integrated Reward-based Resource Management. Rami Melhem, Daniel Mosse (Cosmin Rusu). Motivation & Introduction. Embedded systems Timeliness – tasks have real-time constraints Energy – limited amount of energy available

E N D
Integrated Reward-basedResource Management Rami Melhem, Daniel Mosse(Cosmin Rusu)
Motivation & Introduction • Embedded systems • Timeliness – tasks have real-time constraints • Energy – limited amount of energy available • Task values/rewards – each task has a value, a measure of task importance • Fault tolerance – each task has a probability of failure; need to plan for such contingencies • Goal: allow the device to run most valued applications without depleting the energy source, while still meeting the deadlines S-CITI Mini-Symposium 2004 Apr 30
Two Types of Rewards in S-CITI • Apply rewards in Emergency/Disaster Situations • Two types of applications • Management of Infrastructure (S-CITI) resources • Management of Emergency System resources • Common characteristics • Timeliness • Resource constraints (overloaded system) • Task values/rewards • Goals: • S-CITI: run most valued applications within deadlines • EMS: suggest where to send resources (ambulances, fire trucks, etc) for aiding emergencies S-CITI Mini-Symposium 2004 Apr 30
Task Rewards - Examples • Different algorithms for each version (accuracy levels may be different) • Different computation times for each version, depending on input data (e.g., number of targets to be recognized) • Others • Encoding, decoding at different rates • High/low resolution image processing S-CITI Mini-Symposium 2004 Apr 30
A task reward model reward (value) optional cycles mandatory li ui Continuous Concave reward models • Easy to model • Partial execution rewarded S-CITI Mini-Symposium 2004 Apr 30
Another task reward model reward • Each task has several versions with different rewards and requirements • Discrete rewards (step reward function) r3 r2 r1 • No reward for partial execution r0 c0 c1 c2 c3 cycles S-CITI Mini-Symposium 2004 Apr 30
EMS Example • Reports come in from sensors or personnel: • Fire in apartment building • Cat stranded in tree • Where to send fire trucks, ambulances, etc • This situation is obvious • Save the cat? • Other situations (fire in a row house) may be more difficult to resolve • System will assist Emergency Managers to direct resources appropriately S-CITI Mini-Symposium 2004 Apr 30
Problem Definition • Find the subset of tasks S and the speeds si, so that to: maximize subject to Maximize system value NP-hard Timing constraint Energy constraint S-CITI Mini-Symposium 2004 Apr 30
Algorithm • Start with an empty schedule • Adda new task, even if the timing constraint is violated • Iteratively repair schedule to satisfy timing, FT, and energy constraints • Pack tasks if timing constraint is violated • Increaseversions of tasks after a minimum reward solution • Metrics that involve task values, as well as time, FT, and energy requirements S-CITI Mini-Symposium 2004 Apr 30
Flowchart initialize No Return failure Can add a task? Yes Add task No No Deadline exceeded? All tasks added? Yes Yes Yes Can pack? Save solution No Return solution or failure Yes No Return solution Can increase version? S-CITI Mini-Symposium 2004 Apr 30
Comparison of two algorithms with the optimal Both algorithms closely approximate the optimal Optimal obtained through exhaustive search S-CITI Mini-Symposium 2004 Apr 30
Scalability of algorithms Theoretical upper bound: O(MNlogN) Execution times are < 1ms, even for hundreds of tasks (P-III 1GHz, 256MB RAM) S-CITI Mini-Symposium 2004 Apr 30
GUI/Tool Graphical demonstration at www.cs.pitt.edu/PARTS/demos (author: Patrick Lanigan) S-CITI Mini-Symposium 2004 Apr 30
Conclusions • We have a solution for the problem of maximizing the system value with time and energy constraints • Fast running time allows for adaptation to changes (new tasks added to the system or tasks becoming unavailable) • Need to translate real requirements into values • Algorithmic adaptation • Resources are discrete (trucks, etc) • Precedence constraints exist • Unpredictable workloads must be handled • Add reliability and tolerance to faults S-CITI Mini-Symposium 2004 Apr 30
Backup slides S-CITI Mini-Symposium 2004 Apr 30
Knapsack Problems • Knapsack • N items with values and weights • Which items to select so that to maximize the total value while not exceeding a maximum weight • Bi-dimensional Knapsack • Each item (task) has 2 weights (time/utilization, energy) • Multiple-choice Knapsack (MCKP) • Several choices for each item (task version and task speed) S-CITI Mini-Symposium 2004 Apr 30
Solving the Bi-dimensional MCKP (1/2) • Exhaustive search • Optimal • Impractical, infeasible (exponential) • Dynamic/integer programming • Optimal • Impractical for relatively small task sets (pseudo-polynomial) • Algorithms (genetic , fuzzy sets, cutting planes) • Suboptimal • Impractical (minutes, days) Real-time requirements - microseconds S-CITI Mini-Symposium 2004 Apr 30
Solving the Bi-dimensional MCKP (2/2) • Particularities • Increase speed (frequency) results in increased energy consumption and reduced execution time • More energy efficient at reduced frequencies • Higher versions (at the same speed) have higher execution times and energy requirements • Our solution – greedy algorithm (MV-Pack) • Takes advantage of the above observations • Not intended for the general case of bi-dimensional MCKP S-CITI Mini-Symposium 2004 Apr 30