Download
1 / 20
210 likes | 421 Views
Zachary Wilson Computer Science Department University of Nebraska, Omaha Advisor: Dr. Raj Dasgupta. Multi-robot Coverage with Dynamic Coverage Information Compression.

E N D
Zachary Wilson Computer Science Department University of Nebraska, Omaha Advisor: Dr. Raj Dasgupta Multi-robot Coverage with Dynamic Coverage Information Compression
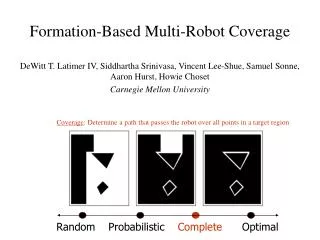
Problem statement: How to coordinate a set of robots so that they can completely cover an initially unknown region within which they are deployed • Encountered in many applications of robotic systems • Detecting landmines for humanitarian demining • Unmanned search and rescue following disasters • Extra-terrestrial exploration • Domestic applications: automated lawn mowing, vacuum cleaning, etc Multi-robot Terrain Coverage Problem
Communication Overhead in Multi-robot Terrain Coverage • Coverage has to be done efficiently • Reducing time, energy (battery) consumed • Reducing the amount of repeated coverage of the same region by multiple robots
Communication Overhead in Multi-robot Terrain Coverage • Coverage has to be done efficiently • Reducing time, energy (battery) consumed • Reducing the amount of repeated coverage of the same region by multiple robots I have to tell other robots what regions I have covered till now so that they don’t re-cover those
Communication Overhead in Multi-robot Terrain Coverage • Coverage has to be done efficiently • Reducing time, energy (battery) consumed • Reducing the amount of repeated coverage of the same region by multiple robots I should also know what regions other robots have covered till now, so that I can avoid and not re-cover those regions I have to tell other robots what regions I have covered till now so that they don’t re-cover those
Communication Overhead in Multi-robot Terrain Coverage • Coverage has to be done efficiently • Reducing time, energy (battery) consumed • Reducing the amount of repeated coverage of the same region by multiple robots • How much info do robots communicate? • Maps exchanged between every pair of robots • Repeated at certain intervals • Map of covered region for each robot keeps growing with time I should also know what regions other robots have covered till now, so that I can avoid and not re-cover those I have to tell other robots what regions I have covered till now so that they don’t re-cover those
Communication Overhead in Multi-robot Terrain Coverage • Coverage has to be done efficiently • Reducing time, energy (battery) consumed • Reducing the amount of repeated coverage of the same region by multiple robots • How much info do robots communicate? • Maps exchanged between every pair of robots • Repeated at certain intervals • Map of covered region for each robot keeps growing with time I should also know what regions other robots have covered till now, so that I can avoid and not re-cover those I have to tell other robots what regions I have covered till now so that they don’t re-cover those Very high communication overhead
Communication Overhead in Multi-robot Terrain Coverage • Coverage has to be done efficiently • Reducing time, energy (battery) consumed • Reducing the amount of repeated coverage of the same region by multiple robots • How much info do robots communicate? • Maps exchanged between every pair of robots • Repeated at certain intervals • Map of covered region for each robot keeps growing with time I should also know what regions other robots have covered till now, so that I can avoid and not re-cover those I have to tell other robots what regions I have covered till now so that they don’t re-cover those More energy (battery), more calculations, more time
Every robot covers a certain region on its own (autonomously) Multi-robot Coverage Information Sharing
Every robot covers a certain region on its own (autonomously) Communicates this coverage map to other robots within communication range Receives other robots’ coverage maps Multi-robot Coverage Information Sharing This is the region I have just covered This is the region I have just covered
Every robot covers a certain region on its own (autonomously) Communicates this coverage map to other robots in communication range Receives other robots’ coverage maps Multi-robot Coverage Information Sharing We need to combine these maps This is the region I have just covered ...without increasing the number of data points (vertices) used to store the combined map This is the region I have just covered
Every robot covers a certain region on its own (autonomously) Communicates this coverage map to other robots in communication range Receives other robots’ coverage maps Multi-robot Coverage Information Sharing We need to combine these maps This is the region I have just covered ...without increasing the number of data points (vertices) used to store the combined map This is the region I have just covered Otherwise,the maps would keep becoming larger and larger as we cover more regions needing more comms...more battery power and time
Coverage Information Compression • Take two or more polygons • Calculate their bounding convex polygon – called convex hull • Make an approximation of the convex hull that has a fixed (constant) number of points – using min-e algorithm
Fitness function used to accept or discard fitted polygon Adjusting weights gives different amount of repeated coverage based on application domain Coverage Compression: Overlapping Regions Landmine detection: Repeated coverage is not fatal, could improve detection accuracy Pesticide application: Repeated coverage can kill crops
Simulation Environment • The Corobot platform: • Stargazer localization module (gives 2-d coordinates) • 5 IR sensors (for avoiding fixed obstacles – walls) • 640x480 camera (used for avoiding moving objects – other robots) • Wi-Fi wireless comms. • 10 AH battery (about 20-30 min. life) • We used 4 simulated test environments: • No obstacles • 10% obstacles • 25% obstacles • Corridor with rooms.
Simulation Results: How Well Does the Coverage Perform • Snapshots of coverage achieved with 2, 3 or 4 robots • 20 X 20 meter2 arena • 2 hours of real time Amount of (instances of) communication between robots in different scenarios
Coverage Efficiency: • The first graph shows the useful distance traveled while doing coverage. • The second graph shows the overhead distance, e.g., moving between regions while not doing coverage. • We see that as the number of obstacles increases, the amount of overhead increases while the amount of coverage decreases. • Peak efficiency is about 2.67 meters of coverage for every meter of overhead (72%). Simulation Results: How Well Does the Coverage Perform
Compression Efficiency: • The first graph shows the compression offered by standard error-free ZIP compression from 4 to 200 data points. • The second graph shows the integrity of data compressed with the min-ε algorithm for different statically-sized approximations. • With a 200 point data-set: • ZIP algorithm: 2% decrease in size, 0% loss • Min-ε algorithm: 98% decrease in size, 10% loss (with a 4 point approximation) Simulation ResultS: How Well Does the INFORMATION COMPRESSION WORK
Conclusions: • Efficient coverage through communication • Efficient communication through compression • Efficient compression through approximation • Hardware implementation also done on Corobot robots • Future work: • More efficient region selection • Neural-network based fitness determination • Comparison with other techniques • Acknowledgements: We are grateful to the U.S. Office of Naval Research for sponsoring this research through the COMRADES project Conclusions and Future Work