Download
1 / 1
10 likes | 169 Views
25. 20. 15. Tip displacement (um). 10. 5. 0. 0. 0.5. 1. 1.5. 2. Voltage (V). Gih-Keong Lau Delft University of Technology Precision and Microsystems Engineering Mekelweg 2, 2628 CD Delft, The Netherlands Tel: +31 15 2786547 Fax: +31 15 2783910 Email: g.lau@tudelft.nl.

E N D
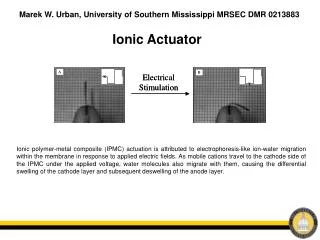
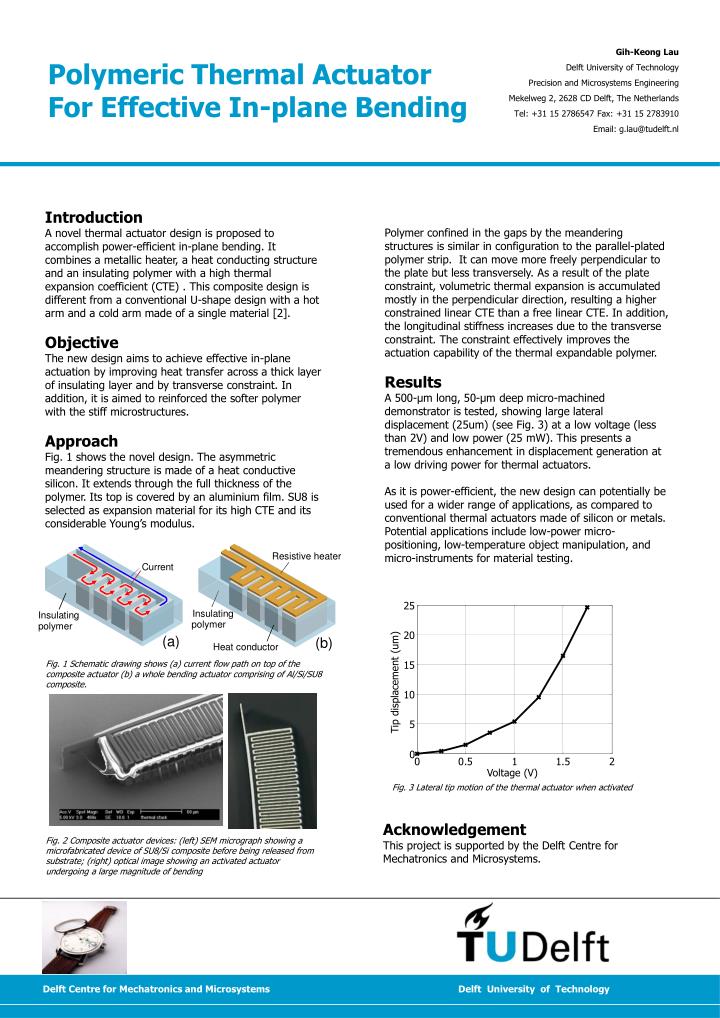
25 20 15 Tip displacement (um) 10 5 0 0 0.5 1 1.5 2 Voltage (V) Gih-Keong Lau Delft University of Technology Precision and Microsystems Engineering Mekelweg 2, 2628 CD Delft, The Netherlands Tel: +31 15 2786547 Fax: +31 15 2783910 Email: g.lau@tudelft.nl Polymeric Thermal Actuator For Effective In-plane Bending Introduction A novel thermal actuator design is proposed to accomplish power-efficient in-plane bending. It combines a metallic heater, a heat conducting structure and an insulating polymer with a high thermal expansion coefficient (CTE) . This composite design is different from a conventional U-shape design with a hot arm and a cold arm made of a single material [2]. Objective The new design aims to achieve effective in-plane actuation by improving heat transfer across a thick layer of insulating layer and by transverse constraint. In addition, it is aimed to reinforced the softer polymer with the stiff microstructures. Approach Fig. 1 shows the novel design. The asymmetric meandering structure is made of a heat conductive silicon. It extends through the full thickness of the polymer. Its top is covered by an aluminium film. SU8 is selected as expansion material for its high CTE and its considerable Young’s modulus. Polymer confined in the gaps by the meandering structures is similar in configuration to the parallel-plated polymer strip. It can move more freely perpendicular to the plate but less transversely. As a result of the plate constraint, volumetric thermal expansion is accumulated mostly in the perpendicular direction, resulting a higher constrained linear CTE than a free linear CTE. In addition, the longitudinal stiffness increases due to the transverse constraint. The constraint effectively improves the actuation capability of the thermal expandable polymer. Results A 500-µm long, 50-µm deep micro-machined demonstrator is tested, showing large lateral displacement (25um) (see Fig. 3) at a low voltage (less than 2V) and low power (25 mW). This presents a tremendous enhancement in displacement generation at a low driving power for thermal actuators. As it is power-efficient, the new design can potentially be used for a wider range of applications, as compared to conventional thermal actuators made of silicon or metals. Potential applications include low-power micro-positioning, low-temperature object manipulation, and micro-instruments for material testing. Fig. 1 Schematic drawing shows (a) current flow path on top of the composite actuator (b) a whole bending actuator comprising of Al/Si/SU8 composite. Fig. 3 Lateral tip motion of the thermal actuator when activated Acknowledgement This project is supported by the Delft Centre for Mechatronics and Microsystems. Fig. 2 Composite actuator devices: (left) SEM micrograph showing a microfabricated device of SU8/Si composite before being released from substrate; (right) optical image showing an activated actuator undergoing a large magnitude of bending