Download

1 / 22
390 likes | 1.43k Views
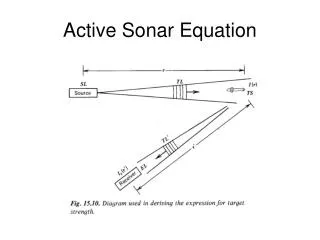
Side Scan Sonar. Side Scan Sonar. Bertram. Towfish: Klein 3000 Frequency: 100/500 KHz Navigation: WADGPS (from Fugro) Processor: Windows 2000 Collection Software: Sonar Pro. Side Scan Sonar. Skiff. Towfish: Marine Sonic Frequency: 150/300 KHz Navigation: WAAS GPS (Trimble MS860)

E N D
Side Scan Sonar • Bertram Towfish: Klein 3000 Frequency: 100/500 KHz Navigation: WADGPS (from Fugro) Processor: Windows 2000 Collection Software: Sonar Pro USM 2004 Upper Pearl Survey
Side Scan Sonar • Skiff Towfish: Marine Sonic Frequency: 150/300 KHz Navigation: WAAS GPS (Trimble MS860) Processor: FieldWorks portable PC Collection Software: SeaScan PC USM 2004 Upper Pearl Survey
Side Scan Sonar • Methodolgy: Tow fish along same lines as MB lines. • Line Spacing:Considered, but not strongly because we were certain to get 100% coverage after test line • Lines: 3,4 lines in main channel 2 lines in Rouchon House branch 4 lines in SBT area USM 2004 Upper Pearl Survey
Side Scan Sonar • Speed: ~ 5 kts on Bertram ~ 3.5 kts on Skiff • Depth: Adjusted in Bertram 2.9 m below surface in Skiff • Layback: Accounted for on Bertram 0 in Skiff • Range: 50 m • Ensonification: >200% USM 2004 Upper Pearl Survey
Side Scan Sonar Data Import: Klein • Step 1 Use Conversion Wizard USM 2004 Upper Pearl Survey
Side Scan Sonar • Step 2 Select Files USM 2004 Upper Pearl Survey
Side Scan Sonar • Step 3 Select Project, Vessel, and Day USM 2004 Upper Pearl Survey
Side Scan Sonar • Step 4 Navigation Coordinate Type • Step 5 Project Extents USM 2004 Upper Pearl Survey
Side Scan Sonar • Step 6 Bathy Data • Step 7 XTF Data Input USM 2004 Upper Pearl Survey
Side Scan Sonar • Step 8 Layback and GPS Height • Step 9 Conversion USM 2004 Upper Pearl Survey
Side Scan Sonar • Editing Manually Digitize Altitude Slant Range Correct USM 2004 Upper Pearl Survey
Side Scan Sonar • Editing Navigation (Reject) USM 2004 Upper Pearl Survey
Side Scan Sonar • Editing Attitude (Reject & Smooth) USM 2004 Upper Pearl Survey
Side Scan Sonar • Identify Targets USM 2004 Upper Pearl Survey
Side Scan Sonar • Contact Prosecution • Look for contact in MB data to determine least depth. • SBES used to run a star pattern over contacts where least depth was not easily discernable in MB data. USM 2004 Upper Pearl Survey
Side Scan Sonar • Field Sheets Created in NAD83 UTM Zone 16 USM 2004 Upper Pearl Survey
Side Scan Sonar • Mosaics • Mosaics of each day were created to determine best coverage • Areas of poor image quality edited out if another line had a better image of a particular area • 51 of 63 Klein files used for final Mosaic 21 of 40 Marine Sonics files used for final Mosaic USM 2004 Upper Pearl Survey
Side Scan Sonar • Mosaics cont’d USM 2004 Upper Pearl Survey
Side Scan Sonar • Geotiffs • 3 made at 300dpi (~5MB) 1. Marine Sonics area 2. Project area using ‘Autoseam’ 3. Project Area using ‘Overwrite’ USM 2004 Upper Pearl Survey
Side Scan Sonar • Lessons Learned • Ensure communication between SSS workstation and Navigation system. • Layback was accounted for by SonarPro, but we were unable to get the layback data out of the XTF format. We may have been able to get this data out of SDF data, but we did not collect it. USM 2004 Upper Pearl Survey
Processing: NavAids Positioning Rafael Ponce