Download
1 / 23
240 likes | 435 Views

E N D
1. Integrated Orbit and Attitude Control for a Nanosatellite with Power Constraints Bo Naasz
Matthew Berry
Hye-Young Kim
Chris Hall
13th Annual AAS/AIAA Space Flight Mechanics Meeting
February 9-13, 2003, Ponce, Puerto Rico
2. Overview ION-F and HokieSat
Orbit & Attitude Coupling
Dynamics
Control
Simulation/Software
Results
3. Ionospheric Observation Nanosatellite Formation (ION-F) Three of 10 student-built spacecraft in AFOSR/DARPA University Nanosatellite Program, also sponsored by NASA Goddard Space Flight Center
Three-satellite stack will launch from Shuttle Hitchhiker Experiment Launcher System
Mission goals
Formation flying demonstration
Distributed ionospheric measurements
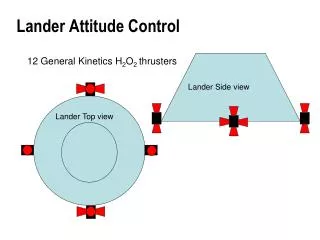
4. HokieSat DCS Hardware Orbit control
UW/Primex Pulsed Plasma Thrusters (PPT)
Impulse bit per thruster: 56 mN
No radial thrust
Paired thrusters cannot fire simultaneously
Attitude control
Magnetic torque coils
Interact with Earth�s magnetic field
Provide < 5 x 10-5 N-m Torque
PPTs for limited yaw steering
5. Maneuver Modes �Normal� mode
Slew as required to point thrusters
Negligible thrust torque
180 degree slews required
�Sideways� mode
Allow thrust torque
Frequent control interruption
No slews required
6. Sources of Orbit-Attitude Coupling Natural dynamics:
Attitude dependent orbit perturbations
Atmospheric drag
Solar radiation pressure
Orbit dependent attitude perturbations
Magnetic field variation
Gravity gradient torque
Dynamical coupling (very weak)
Natural dynamics
Attitude dependent orbit perturbations
Atmospheric drag
Solar radiation pressure
Orbit dependent attitude perturbations
Magnetic field variation
Gravity gradient torque
Dynamical coupling (very weak)
Guidance Navigation & Control (GNC) System
Shared resources
Actuators (thrusters for orbit and attitude control, momentum dumping)
Sensors (star trackers for attitude determination, celestial navigation)
Power and spacecraft consumables
Actuator induced disturbances
Non-coupled thrusters
Thruster disturbance torques
Subsytem inter-dependencies
Drag/SRP control
Thruster pointing
Natural dynamics
Attitude dependent orbit perturbations
Atmospheric drag
Solar radiation pressure
Orbit dependent attitude perturbations
Magnetic field variation
Gravity gradient torque
Dynamical coupling (very weak)
Guidance Navigation & Control (GNC) System
Shared resources
Actuators (thrusters for orbit and attitude control, momentum dumping)
Sensors (star trackers for attitude determination, celestial navigation)
Power and spacecraft consumables
Actuator induced disturbances
Non-coupled thrusters
Thruster disturbance torques
Subsytem inter-dependencies
Drag/SRP control
Thruster pointing
7. Dynamics Orbit
Two body motion
Control forces from thrusters
Perfect state knowledge
Attitude
External torques from gravity gradient, thrusters
Control torques from magnetic torque coils
Perfect state knowledge
8. Orbit Control
9. Thrust On/Off Logic Normal mode
10. Thrust On/Off Logic (cont�d)
11. Attitude Control LQR
Torque perpendicular to magnetic field direction only
Desired attitude set by maneuvering mode and desired thrust direction
Assume torque is throttleable, with a maximum of ~ 5 x 10-5 N-m Torque
12. Simulation Reference orbit:
Semi-major axis: 6770 km
Circular (e ? 0)
Inclination: 52?
Spacecraft initial conditions:
700m leader follower
700m same ground track
Propagation:
1 second time step
Runge-Kutta integration for Orbit and Attitude
Software
written in C++
Prototype of flight code
4 processes
Orbit determination
Orbit control
Attitude determination
Attitude control
13. Results � Leader Follower, Normal Mode
14. Results � Same Ground Track, Normal Mode
15. Results � Same Ground Track, Sideways Mode
16. Summary
18. Control orbital 6DOF as two systems
First System:
First five elements (size, shape, orientation of orbit) Orbital Control
19. Orbit Control
Second system (a feedback phasing maneuver):
Sixth element (angular position within the orbit)
20. Orbit Dynamics
23. Spacecraft Formation Flying
24. Problem Statement Control the motion of formation-flying spacecraft using integrated nonlinear orbit and attitude feedback control laws to achieve a predefined target orbit.