Download
1 / 57
590 likes | 847 Views
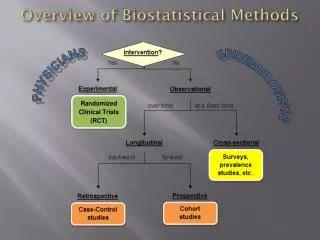
Overview of Some Coherent Noise Filtering Methods. Jianhua Yue, Yue Wang, Gerard Schuster University of Utah. Problem: Ground Roll Degrades Signal. Reflections. Ground Roll. Offset (ft). 2000. 3500. 0. Time (sec). 2.5. PP Reflections. Converted S Waves.

E N D
Overview of SomeCoherent Noise Filtering Methods Jianhua Yue, Yue Wang, Gerard Schuster University of Utah
Problem: Ground Roll Degrades Signal Reflections Ground Roll Offset (ft) 2000 3500 0 Time (sec) 2.5
PP Reflections Converted S Waves Problem: PS Waves Degrade Signal 0 Time (sec) 4.0
Problem: Tubes Waves Obscure PP 2000 Depth (ft) 3100 0 Reflections Reflections Time (sec) Time (s) Aliased tube waves Converted S Waves 0.14 4.0
Outline • Radon Filtering Methods • ARCO Field Data Results • Saudi Land Data • Multicomponent Data Example • Conclusion and Discussion
Model Noise and Adaptive Subtraction Filter that Exploit Moveout Differences Two Classes of Coherent Noise Filtering
F-K Dip Filtering Filtering in - p domain linear - p parabolic - p hyperbolic - p local+adaptive subtraction Least Squares Migration Filter Filtering Methods: Moveout Separation
SIGNAL SIGNAL NOISE Overlap Signal & Noise NOISE Separation Principle: Exploit Differences in Moveout & Part. Velocity Directions Transform Frequency Time Wavenumber Distance
Tau-P Transform Sum Transform Tau Time V=1/P Distance
Tau-P Transform Transform Tau Time V=1/P Distance
Mute Noise Transform Tau-P Transform Tau Time V=1/P Distance
Problem: Indistinct Separation Signal/Noise Tau-P Transform Transform Tau Time V=1/P Distance
Distinct Separation Signal/Noise Hi res. Hyperbolic Transform Tau-P Transform Transform Tau Time V=1/P Distance
Breakdown of Hyperbolic Assumption Irregular Moveout * v v v v v v v v v Time Distance
d = L m +L m Invert for m & m Kirchhoff Modeler s p s s P-reflectivity d = L m p p S-Refl. Kirchhoff Modeler Filtering by LSMF d PP Time PS Distance
d = L m +L m s s 1. p p data unknowns 2. Find m by conjugate gradient p d = L m 3. Model Coherent Signal p p LSMF Method
Outline • Radon Filtering Methods • ARCO Surface Wave Data • Saudi Land Data: Local Adapt.+Subt. • Multicomponent Data Example • Conclusion and Discussion
RAW DATA OF ARCO X (kft) 1.8 3.6 0 Time (s) 2.5 Raw Data
X (kft) X (kft) FK LSMF ARCO DATA 1.8 3.6 1.8 3.6 0 A A Time (s) B B 2.5
ZOOM VIEW OF WINDOW “ A” X (kft) X (kft) 2.0 3.0 2.0 3.0 0.5 Time (s) 1.5 FK LSMF
ZOOM VIEW OF WINDOW “ B” X (kft) X (kft) 2.0 3.45 2.0 3.45 1.5 Time (s) 2.5 FK LSMF
Outline • Radon Filtering Methods • ARCO Surface Wave Data • Saudi Land Data: Local Adapt.+Subt. • Multicomponent Data Example • Conclusion and Discussion
Local tau-p Aramco Saudi Land Data 0.0s 4.0s
S N + Tau-p ~ ~ S N + -1 Tau-p Adaptive Subtraction = S N N S + -
INPUT LOCAL TAU-P 0.0s Input After Noise Reduction 4.0s (courtesy Yi Luo @ Aramco)
Input FK Signal FK F F K K
Outline • Radon Filtering Methods • ARCO/Saudi Field Data Results • Multicomponent Data Example • Graben Example • Mahagony Example • Conclusion and Discussion
Graben Velocity Model X (m) 0 5000 0 V1=2000 m/s V2=2700 m/s V3=3800 m/s Depth (m) V4=4000 m/s V5=4500 m/s 3000
PP1 Leak PP1 PP2 PP2 Leak PP3 Leak PP3 PP4 PP4 Leak Synthetic Data Offset (m) Offset (m) 5000 0 5000 0 0 Time (s) 1.4 Horizontal Component Vertical Component
PP1 PP2 PP3 PP4 LSMF Separation 5000 0 Offset (m) 5000 0 Offset (m) 0 Time (s) 1.4 Horizontal Component Vertical Component
PP1 PP2 PP3 PP4 True P-P and P-SV Reflection 5000 0 Offset (m) 5000 0 Offset (m) 0 Time (s) 1.4 Horizontal Component Vertical Component
PP1 Leak PP1 PP2 Leak PP2 PP3 PP3 Leak PP4 Leak PP4 F-K Filtering Separation 5000 0 Offset (m) 5000 0 Offset (m) 0 Time (s) 1.4 Horizontal Component Vertical Component
Outline • Radon Filtering Methods • ARCO/Saudi Field Data Results • Multicomponent Data Example • Graben Example • Mahagony Field Data • Conclusion and Discussion
PS PS PS CRG1 Raw Data 0 Time (s) 4 CRG1 (Vertical component)
PS PS PS CRG1 Data after Using F-K Filtering 0 Time (s) 4 CRG1 (Vertical component)
PS PS PS CRG1 Data after Using LSMF 0 Time (s) 4 CRG1 (Vertical component)
Filtering signal/noise using: moveout difference & particle velocity direction Don’t use a shotgun to kill a fly Conclusions Local tau-p and adaptive subtraction LSMF computes moveout and particle velocity direction based on true physics.
Simple Filtering YES YES YES YES Complex Filtering No YES/No YES/no YES User Intervention Mild Yes Yes Yes Cost c $ $ $$$$ Proven YES YES YES Yes/No SUMMARY FK Linear Tau-P Parabolic Tau-P LSMF
SAUDI DATA X(m) 88 2988 0 Time (s) 4.0 Raw Data
SAUDI DATA AFTER FK & LSMF X(m) X (m) 88 2988 88 2988 0 A A B B Time (s) 4.0 FK LSMF
CRG2 Data after Using F-K Filtering (vertical component) 0 Time (s) 4 CRG2 (Vertical component)
CRG2 Data after Using LSMF (vertical component) 0 Time (s) 4 CRG2 (Vertical component)
ZOOM VIEW OF WINDOW A X (m) X (m) 890 2088 890 2088 1.0 Time (s) 2.0 FK LSMF
ZOOM VIEW OF WINDOW B X (m) X (m) 186 1189 186 1189 0.7 Time (s) 2.0 FK LSMF
SAUDI DATA X(m) 88 2089 0 Time (s) 4.0 Raw Data
SAUDI DATA AFTER FK & LSMF X(m) X (m) 88 2089 88 2089 0 A A B B Time (s) 4.0 FK LSMF
ZOOM VIEW OF WINDOW “A” X (m) X (m) 327 1370 327 1370 0.6 Time (s) 2.0 FK LSMF
ZOOM VIEW OF WINDOW “B” X (m) X (m) 186 621 186 621 0.4 Time (s) 1.4 FK LSMF
Overview of SomeCoherent Noise Filtering Merthods Overview There are a number of different coherent noise filtering methods, including FK dip filter, Radon transform, hyperbolic transform, and parabolic transform methods. All of these methods rely upon transforming the signal into a new domain where the signal and noise are more separable. We will show that LSM filtering is another coherent filtering method, but is more precise in defining a transform that separates signal and coherent noise according to the physics of wave propagation. Examples show that this is sometimes a more effective ilter, but it is more costly.
Multicomponent Filtering by LSMF PP d = L m +L m PS p p x s s d = L m +L m p p z s s PS PP Time Z Distance