Download
1 / 1
40 likes | 235 Views
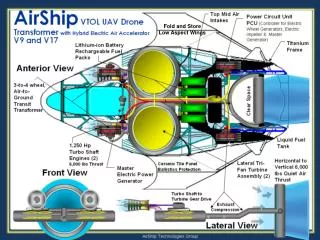
DLR –AIRBUS: Very Efficient Large Aircraft - VELA. Projet RTRA – DYNAMORPH : Morphing Electroactif en régimes dynamiques Réalisations: restitution projet EMMAV vers DYNAMORPH et chantier SMARTWING 01/2012- 12/2015 Coordonnateur: IMFT - Marianna BRAZA - Directrice de Recherche CNRS

E N D
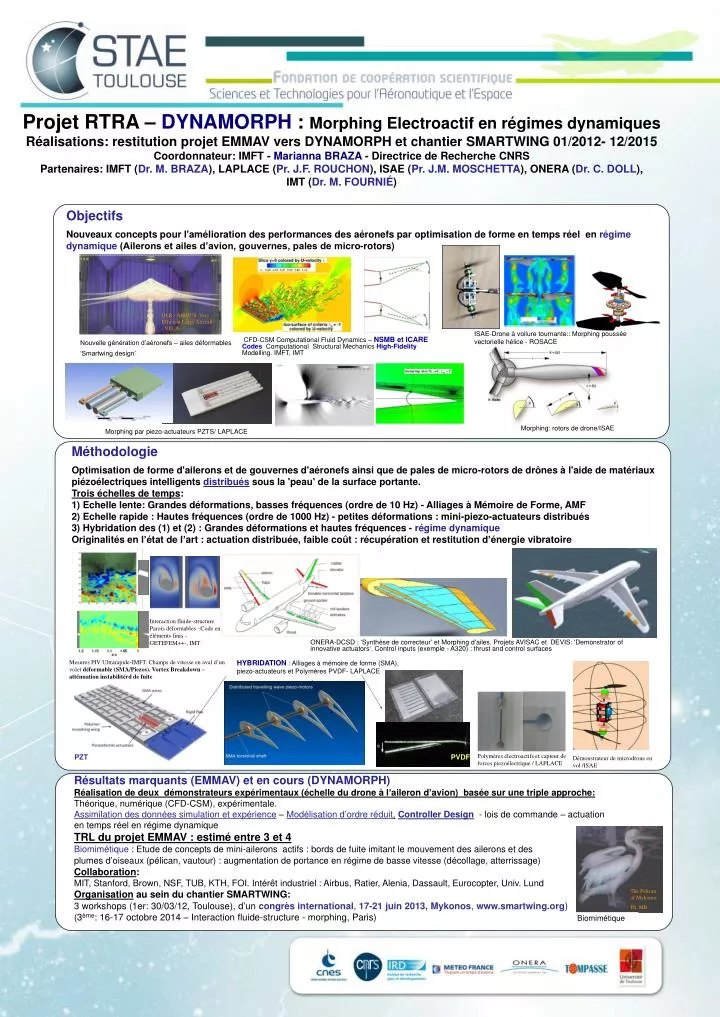
DLR –AIRBUS: Very Efficient Large Aircraft - VELA Projet RTRA – DYNAMORPH : Morphing Electroactif en régimes dynamiques Réalisations: restitution projet EMMAV vers DYNAMORPH et chantier SMARTWING 01/2012- 12/2015 Coordonnateur: IMFT - Marianna BRAZA- Directrice de Recherche CNRS Partenaires: IMFT (Dr. M. BRAZA), LAPLACE (Pr. J.F. ROUCHON), ISAE (Pr. J.M. MOSCHETTA), ONERA (Dr. C. DOLL), IMT (Dr. M. FOURNIÉ) Objectifs Nouveaux concepts pour l'amélioration des performances des aéronefs par optimisation de forme en temps réel en régime dynamique (Ailerons et ailes d’avion, gouvernes, pales de micro-rotors) DLR –AIRBUS: Very Efficient Large Aircraft - VELA ISAE-Drone à voilure tournante:: Morphing poussée vectorielle hélice - ROSACE CFD-CSM Computational Fluid Dynamics – NSMB et ICARECodes Computational Structural Mechanics High-Fidelity Modelling. IMFT, IMT Nouvelle génération d’aéronefs – ailes déformables ‘Smartwing design’ Morphing: rotors de drone/ISAE Morphing par piezo-actuateurs PZTS/ LAPLACE Méthodologie Optimisation de forme d'ailerons et de gouvernes d'aéronefs ainsi que de pales de micro-rotors de drônes à l'aide de matériaux piézoélectriques intelligents distribués sous la 'peau' de la surface portante.Trois échelles de temps:1) Echelle lente: Grandes déformations, basses fréquences (ordre de 10 Hz) - Alliages à Mémoire de Forme, AMF2) Echelle rapide : Hautes fréquences (ordre de 1000 Hz) - petites déformations : mini-piezo-actuateurs distribués3) Hybridation des (1) et (2) : Grandes déformations et hautes fréquences - régime dynamique Originalités en l’état de l’art : actuation distribuée, faible coût : récupération et restitution d’énergie vibratoire Interaction fluide-structure Parois déformables –Code en éléments finis - GETEFEM++-, IMT ONERA-DCSD : ‘Synthèse de correcteur’ et Morphing d’ailes. Projets AVISAC et DEVIS: 'Demonstrator of innovative actuators‘. Control inputs (exemple - A320) : thrust and control surfaces Mesures PIV Ultrarapide-IMFT. Champs de vitesse en aval d’un volet déformable (SMA/Piezos). VortexBreakdown – atténuation instabilitérd de fuite HYBRIDATION : Alliages à mémoire de forme (SMA), piezo-actuateurs et Polymères PVDF- LAPLACE Polymères électroactifs et capteur de forces piezoélectrique / LAPLACE PZT PVDF Démonstrateur de microdrone en vol /ISAE Résultats marquants (EMMAV) et en cours (DYNAMORPH) Réalisation de deux démonstrateurs expérimentaux (échelle du drone à l’aileron d’avion) basée sur une triple approche: Théorique, numérique (CFD-CSM), expérimentale. Assimilation des données simulation et expérience– Modélisation d’ordre réduit,Controller Design- lois de commande – actuation en temps réel en régime dynamique TRL du projet EMMAV : estimé entre 3 et 4 Biomimétique : Etude de concepts de mini-ailerons actifs : bords de fuite imitant le mouvement des ailerons et des plumes d’oiseaux (pélican, vautour) : augmentation de portance en régime de basse vitesse (décollage, atterrissage) Collaboration: MIT, Stanford, Brown, NSF, TUB, KTH, FOI. Intérêt industriel : Airbus, Ratier, Alenia, Dassault, Eurocopter, Univ. Lund Organisation au sein du chantier SMARTWING: 3 workshops (1er: 30/03/12, Toulouse), d’un congrès international, 17-21 juin 2013, Mykonos, www.smartwing.org) (3ème: 16-17 octobre 2014 – Interaction fluide-structure - morphing, Paris) The Pelican of Mykonos Ph. MB Biomimétique