Download
1 / 53
530 likes | 670 Views
Muscle. internal motors of human body responsible for all movements of skeletal system only have the ability to pull must cross a joint to create motion can shorten up to 70% of resting length. CC contractile component. SEC series elastic component. PEC parallel elastic component.

E N D
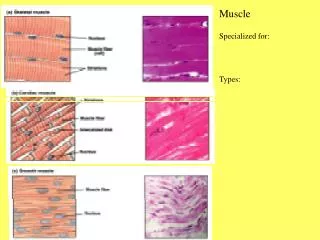
Muscle • internal motors of human body responsible for all movements of skeletal system • only have the ability to pull • must cross a joint to create motion • can shorten up to 70% of resting length
CC contractile component SEC series elastic component PEC parallel elastic component Muscle-Tendon Model • 3 components
Whole Muscle CC SEC PEC Muscle Model • Contractile Component (CC) • active shortening of muscle through actin-myosin structures • Parallel Elastic Component (PEC) • parallel to the contractile element of the muscle • the connective tissue network residing in the perimysium, epimysium and other connective tissues which surround the muscle fibers • Series Elastic Component (SEC) • in series with the contractile component • resides in the cross-bridges between the actin and myosin filaments and the tendons
Tissue CC SEC PEC Viscoelastic Structures Both SEC & PEC behave like springs when acting quickly but they also have viscous nature If muscle is statically stretched it will progressively stretch over time and will slowly return to resting length when the stretching force is removed.
Whole Muscle CC SEC PEC Stretch-Shortening Cycle • a quick stretch followed by concentric action in the muscle • Store energy in elastic structures • Recover energy during concentric phase to produce more force than concentric muscle action alone • examples • vertical jump: counter-movement vs. no counter-movement • plyometrics
Tissue Tissue Properties of Muscle • irritability - responds to stimulation by a chemical neurotransmitter (ACh) • contractibility - ability to shorten (50-70%), usually limited by joint range of motion • distensiblity - ability to stretch or lengthen, corresponds to stretching of the perimysium, epimysium and fascia • elasticity - ability to return to normal state (after lengthening)
Tissue Muscle Structure “Bundle-within-a-Bundle”
Tissue actin myosin Sliding Filament Theory 1) Myosin filaments form a cross-bridge to actin 2) Myosin pulls actin 4) Myosin ready for another x-bridge formation 3) x-bridge releases
Tissue Sarcomere Organization • the number of sarcomeres in series or in parallel will help determine the properties of a muscle 3 sarcomeres in series (high velocity/ROM orientation) 3 sarcomeres in parallel (high force orientation)
Sarcomere organization example: Note that the values are not representative of actual sarcomeres.
Sarcomere Organization • the longer the tendon-to-tendon length the greater number of sarcomeres in series • the greater the physiological cross-sectional area (PCSA) the greater number of sarcomeres in parallel sarcomeres in series sarcomeres in parallel
Muscle Structure Fusiform (parallel) • fibers run longitudinally • generally fibers do not extend the entire length of muscle
Tissue Muscle StructurePennate • tendon runs parallel to the long axis of the muscle, fibers run diagonally to axis (short fibers)
Tissue Fusiform vs. Pennate • fusiform • advantage: sarcomeres are in series so maximal velocity and ROM are increased • disadvantage: relatively low # of parallel sarcomeres so the force capability is low • pennate • advantage: increase # of sarcomeres in parallel, so increased PCSA and increased force capability • disadvantage: decreased ROM and velocity of shortening
Tissue Fiber Types • all fibers within a motor unit are of the same type • within a muscle there is a mixture of fiber types • fiber type may change with training • recruitment is ordered • type I recruited 1st (lowest threshold) • type IIa recruited second • type IIb recruited last (highest threshold)
Tissue Fiber Type Comparison
Tissue l0 Tension l0 Length Active Length-Tension - neither contracted nor stretched
Tissue l0 physiological limit combined active passive l0 Length-Tension - neither contracted nor stretched T L
Tissue Force - Velocity Relationship v < 0 (eccentric) v > 0 (concentric) force velocity of contraction v=0 (isometric)
Tissue Power - Velocity Relationship F Power (F*v) v 30% vmax
Whole Muscle Muscle Attachment - Tendons Fusion b/w epimysium and periosteum Tendon fused with fascia
Whole Muscle Muscle Terms attachment can be directly to the bone or indirectly via a tendon or aponeurosis Origin -- generally proximal, fleshy attachment to the stationary bone Insertion -- generally distal, tendinous and attached to mobile bone defining origin or insertion relative to action of bone is difficult e.g. hip flexors in leg raise v. sit-up
Whole Muscle Functions of Muscle • produce movement - when the muscle is stimulated it shortens and results in movement of the bones • maintain postures and positions - prevents motion when posture needs to be maintained • stabilize joints - muscles crossing a joint can pull the bones toward each other and contribute to the stability of the joint
Whole Muscle Functional Muscle Groups • generally have more than 1 muscle causing same motion at a joint • together these muscles are referred to as a functional group • e.g. elbow flexors -- biceps brachii, brachialis, and brachioradialis - all flex elbow
Whole Muscle Role of the Muscle • prime mover - the muscles primarily responsible for the movement • assistant mover - musclesused only when more force is required • agonist- muscles responsible for the movement • antagonist - performs movement opposite of agonist • stabilizer - active in one segment to stabilize a bone so that a movement in an adjacent segment can occur • neutralizer - active to eliminate an undesired joint action of another muscle
Whole Muscle SHOULDER ABDUCTION agonist: deltoid antagonist: latissimus dorsi stabilizer: trapezius holds the shoulder girdle in place so the deltoid can pull the humerus up neutralizer: teres minor if latissimus dorsi is active then the shoulder will tend to internally rotate, so the teres minor can be used to counteract this via its ability to externally rotate the shoulder
Whole Muscle Muscular Action • isometric action • no change in fiber length • concentric action • shortening of fibers to cause movement at a jt • eccentric action • lengthening of fibers to control or resist a movement
Whole Muscle
Whole Muscle concentric eccentric • Concentric action: • work against gravity to raise the body or objects • speed up body segments or objects • Eccentric action: • work with gravity to lower the body or objects • slow down body segments or objects
Elbow Actions Whole Muscle • push-up • up - concentric action of elbow extensors • down - eccentric action of elbow extensors • catching a baseball • eccentric action of elbow extensors • throwing a baseball • concentric action of elbow extensors • pull-up • up - concentric action of elbow flexors • down - eccentric action of elbow flexors
Whole Muscle The countermovement elicits an increase in force production the increase in force production is 30% neural and 70% elastic contribution Greatest return of energy is achieved using a “drop-stop-pop” action with only an 8”-12” drop
Whole Muscle Number of Joints Crossed • uniarticularor monoarticular - the muscle crosses 1 joint, so it affects motion at only 1 joint • biarticular or multiarticular - the muscle crosses 2 (bi) or more (multi) joints, so it can produce motion across multiple joints
Whole Muscle Multiarticular Muscles • can reduce the contraction velocity • can transfer energy between segments • can reduce the work required of single-joint muscles • more susceptible to injury
Whole Muscle Insufficiency • a disadvantage of 2-joint muscles • active insufficiency - cannot actively shorten to produce full ROM at both joints simultaneously • passive insufficiency - cannot be stretched to allow full ROM at both joints simultaneously
Whole Muscle Insufficiency Example • squeeze the index finger of another student • move the wrist from extreme hyperextension to full flexion • What happens to the grip strength throughout the ROM? • WHY?
Whole Muscle Movement/Activity Properties of Muscle • flexibility - the state of muscle’s length which restricts or allows freedom of joint movement • endurance - the ability of muscles to exert force repeatedly or constantly
Whole Muscle Movement/Activity Properties of Muscle (cont.) • strength - the maximum force that can be achieved by muscular tension • power - the rate at which physical work is done or the force created by a muscle multiplied by its contraction velocity
Whole Muscle Muscular Strength • measure absolute force in a single muscle preparation • in real life most common estimate of muscle strength is maximum torque generated by a given muscle group
Whole Muscle Strength Gains Training focuses on developing larger x-sectional area AND developing more tension per unit of x-sectional area Magnitude of strength gains dependent on 1) genetic predisposition 2) training specificity 3) intensity 4) rest 5) volume from an “untrained state” 1st 12 weeks see improvement on the neural side via improved innervation later see increase in x-sectional area
Whole Muscle Isotonic Exercise Isokinetic Exercise Isometric Exercise Training Modalities Variable Resistance Exercise Close-Linked Exercises
Whole Muscle Muscle Injury Individuals at risk a) fatigued state b) not warmed-up c) new exercise/task d) compensation Greatest Risk a) 2-joint muscles b) muscles that limit ROM c) muscles used eccentrically Soreness v. Damage damage believed to be in fiber sorenessdue to connective tissue
rotary component causes motion perpendicular to the rotating segment stabilizing or dislocating component parallel to rotating segment stabilizing is toward joint dislocating is away from joint Whole Muscle Muscular Force Components
Whole Muscle Muscular Force Components • components depend on the joint angle large rotary small stabilizing medium rotary medium dislocating small rotary large stabilizing
Whole Muscle What Causes Motion?Force or Torque? • angular motion occurs at a joint so technically torque causes motion • torque is developed because the point of application of the force produced by muscle is some distance away from the joint’s axis of rotation muscle force (Fm) muscle torque (Tm) distance between pt of application and joint axis (dm)
Whole Muscle Fm Fm Fm o 60 To solve problem we must resolve the vector Fminto components which are perpendicular (Fm ) and parallel (Fm ) to the forearm. * Tm = Fmd Torque = 400 N * 0.03 m becasue Fm is not perpendicular to the forearm!!! Calculation of Muscle Torque 400 N 0.03 m
Whole Muscle Fm Fm Fm Fm 400 N Fm Fm 0.03 m Calculation of Muscle Torque Only the perpendicular component will create a torque about the elbow joint so only need to calculate this.
Whole Muscle T = 345 N * 0.03 m = 10.4 Nm FR = 345 N FR = 345 N 400 N 0.03 m 400 N FR = 200 N T = 200 N * 0.03 m = 6 Nm 0.03 m Angle of Pull Affects Torque
Whole Muscle T = 345 N * 0.03 m = 10.4 Nm FR = 345 N FR = 345 N 400 N 600 N FR = 345 N 0.03 m FR = 520 N T = 520 N * 0.03 m = 15.6 Nm 0.03 m Size of Muscle Force Affects Torque
Whole Muscle T = 345 N * 0.03 m = 10.4 Nm FR = 345 N FR = 345 N 400 N 400 N 0.03 m T = 345 N * 0.1 m = 34.5 Nm FR = 345 N 0.1 m Moment Arm Affects Torque