Download
1 / 15
150 likes | 158 Views
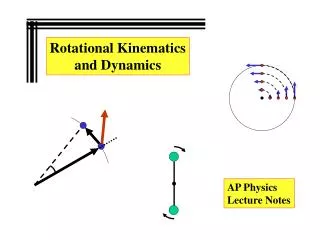
ME321 Kinematics and Dynamics of Machines. Steve Lambert Mechanical Engineering, U of Waterloo. Kinematics and Dynamics. Position Analysis Velocity Analysis Acceleration Analysis Force Analysis. We will concentrate on four-bar linkages. Acceleration Analysis. Use vector loop equations

E N D
ME321 Kinematics and Dynamics of Machines Steve Lambert Mechanical Engineering, U of Waterloo
Kinematics and Dynamics • Position Analysis • Velocity Analysis • Acceleration Analysis • Force Analysis We will concentrate on four-bar linkages
Acceleration Analysis • Use vector loop equations • Vector equations can be expressed in general form, or specialized for planar problems • Graphical Solutions • Vector Component Solutions • Complex Number Solutions (in text)
Vector Equations for Velocity Differentiate Position Vector with respect to Time
Vector Equation for Acceleration Differentiate velocity equation: To obtain acceleration relation:
Acceleration Equations Where: - Acceleration of origin - Acceleration in local frame - Coriolis acceleration - Angular acceleration - Centripetal acceleration
Planar Velocity Equations • Assume: • Motion is restricted to the XY plane • Local frame is aligned with and fixed to link • Therefore: • becomes the angular velocity of the link, and • local velocity becomes the change in length of the link
Planar Velocity Equations Becomes:
Vector Component Solution But: and Giving: