Download
1 / 14
140 likes | 151 Views
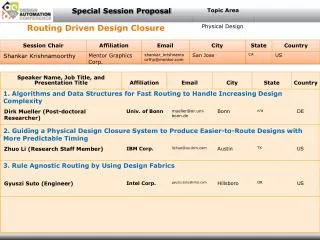
On Mismatches Between Incremental Optimizers and Instance Perturbation in Physical Design Tools. Andrew B. Kahng and Stefanus Mantik UCSD CSE & ECE Depts., La Jolla, CA UCLA CS Dept., Los Angeles, CA abk@ucsd.edu, stefanus@cs.ucla.edu Supported by MARCO GSRC and Cadence Design Systems, Inc.

E N D
On Mismatches Between Incremental Optimizers and Instance Perturbation in Physical Design Tools Andrew B. Kahng and Stefanus Mantik UCSD CSE & ECE Depts., La Jolla, CA UCLA CS Dept., Los Angeles, CA abk@ucsd.edu, stefanus@cs.ucla.edu Supported by MARCO GSRC and Cadence Design Systems, Inc.
Emerging Need for Incremental Optimizers • Design size , complexity , time-to-market • reuse of design IP • timing closure (layout-logic synthesis unifications) • Construct-by-correction flow • placement timing analysis timing optimization • netlist changes (repeaters, resizing, clock) = ECO’s • Incremental optimization is needed • use previous solution as the starting point • ideally, next solution remains similar while maintaining quality
Incremental Optimization • An original instance, I0, is solved by a full algorithm to yield solution S0 • Perturbed instances, I1, …, In,are generated one by one in sequence (Ii = Ii-1 + Ii , i = 1, …, n; |Ii | = perturbation size) • Each perturbed instance is solved by an incremental algorithm which uses Si-1 as the starting point for finding solution Si , i = 1, …, n
Related Works • Physical Design Roadmap [itrs99] • incremental optimization has been a stated need in the roadmap (NTRS, ITRS) since 1997 • incremental optimization is needed for future technology (www.itrs.net) • Incremental optimization • incremental optimization formulations in physical design [CongSarrafzadeh00] • Problem-space metaheuristic • idea: change objective function to escape local minima [Hajek88, StorerWuVaccari92, OsmanKelly96]
Outline • Potential mismatch: instance perturbation vs. optimizer strength • Experimental design • Experimental results • partitioning • placement • routing • Conclusions and future work
I1 I2 S0 S1 S1 S2 Does the Size of IMatter? Size of Imatters!
Potential Mismatch: Instance Perturbation vs. Optimizer Strength • Consider the sequence of instances I0, I1, …, In and solutions S0, S1, …, Sn : • Can the quality of solution Sn be worse than that of solution S0? • If so, can the decrease in solution quality be attributed to: • aspects of the sequence I0, I1, …, In (in particular, the “distance” between successive instances)? • aspects of the incremental algorithm (in particular, its “strength” or “weakness”)?
Experimental Hypotheses:Perturbation Size vs. Optimizer Strength • A strong incremental algorithm + smallchanges maintain good solution quality but waste computational resources • A weak incremental algorithm + large changes steadily worsening solution • Instance changes must be compatible with the strength of the incremental algorithm • must escape basins of attraction to find good solutions • but, should not waste extra computational resources
Experimental Design • Are current incremental algorithms capable of escaping from a basin of attraction? • Reversal-based experiment • construct a series of instances I0, …, Ik-1, Ik, Ik+1, …, I2k where I0 = I2k, I1 = I2k-1, etc. • S2k is better than S0? • Does the size of perturbation Ihave any effect on the quality of the solution? • Dicing-based experiment • break I into smaller perturbations (I = 1 + 2 + … + m, I = I0 + I, I1 = I0 + 1, I2 = I1 + 2, ..., Im = Im-1 + m) • Sm is better than S?
Experiments in Partitioning Domain • Instance: netlist hypergraphs • Perturbation: weight changes for hyperedge weights • Incremental optimizer: UCLA MLPartitioner • Near best-known quality • Problem-space metaheuristic approach is very effective
Experiments in Placement Domain • Instance: circuit netlists • Perturbation: random deletion of cells • Incremental optimizer: Cadence QPlace in incremental mode (optimization level = 3) • Incremental placement algorithm is too strong
Experiments in Routing Domain • Instance: placed circuit netlists • Perturbation: changes in cell orientations • Incremental optimizer: Cadence WarpRoute in incremental mode • Incremental routing seems difficult!
3.54+e06 3.52+e06 3.50+e06 3.48+e06 3.46+e06 3.44+e06 3.42+e06 0 200 400 600 800 1000 1200 Dicing Experiment Results for Routing Multiple small perturbations Wirelength One big perturbation # Flipped Cells Perturbation size should be sufficiently large before applying incremental optimization
Conclusions and Ongoing Work • Current design tools may not be correctly architected to handle incremental optimizations • problem-space metaheuristic approach may be very effective for partitioning • incremental placement algorithms are too strong • perturbation size should be large before attempting incremental routing • Ongoing research: • finding incremental algorithms that are sensitive to perturbation size and that preserve solution structure • V-cycling based incremental partitioning and top-down placement • distinguish incrementality w.r.t. objective from incrementality w.r.t. instance structure