Download
1 / 30
300 likes | 460 Views
RECENT DEVELOPMENTS IN MULTILAYER PERCEPTRON NEURAL NETWORKS. Walter H. Delashmit Lockheed Martin Missiles and Fire Control Dallas, TX 75265 walter.delashmit@lmco.com walter.delashmit@verizon.net Michael T. Manry The University of Texas at Arlington Arlington, TX 76010 manry@uta.edu

E N D
RECENT DEVELOPMENTS IN MULTILAYER PERCEPTRON NEURAL NETWORKS Walter H. Delashmit Lockheed Martin Missiles and Fire Control Dallas, TX 75265 walter.delashmit@lmco.com walter.delashmit@verizon.net Michael T. Manry The University of Texas at Arlington Arlington, TX 76010 manry@uta.edu Memphis Area Engineering and Science Conference 2005 May 11, 2005
Outline of Presentation • Review of Multilayer Perceptron Neural Networks • Network Initial Types and Training Problems • Common Starting Point Initialized Networks • Dependently Initialized Networks • Separating Mean Processing • Summary
MLP Performance Equations Mean Square Error (MSE): Output: Net Function:
Net Control Scales and shifts all net functions so that they do not generate small gradients and do not allow large inputs to mask the potential effects of small inputs
Neural Network Training Algorithms • Backpropagation Training • Output Weight Optimization – Hidden Weight Optimization (OWO-HWO) • Full Conjugate Gradient
Output Weight Optimization – Hidden Weight Optimization (OWO-HWO) • Used in this development • Linear equations used to solve for output weights in OWO • Separate error functions for each hidden unit are used and multiple sets of linear equations solved to determine the weights connecting to the hidden units in HWO
Problem Definition • Assume that a set of MLPs of different sizes are to be designed for a given training data set • Let be the set of all MLPs for that training data having Nh hidden units, Eint(Nh) denote the corresponding training error of am initial network that belongs to • Let Ef(Nh) denote the corresponding training error of a well-trained network • Let Nhmax denote the maximum number of hidden units for which networks are to be designed • Goal: Choose a set of initial networks from {S0, S1, S2, … }such that Eint(0) Eint (1) Eint (2) …. Eint(Nhmax) and train the network to minimize Ef(Nh) such that Ef(0) Ef (1) Ef (2) …. Ef(Nhmax) • Axiom 3.1: If Ef(Nh) Ef (Nh-1) then the network having Nh hidden units is useless since the training resulted in a larger, more complex network with a larger or the same training error.
Network Design Methodologies • Design Methodology One (DM-1) – A well-organized researcher may design a set of different size networks in an orderly fashion, each with one or more hidden units than the previous network • Thorough design approach • May take longer time to design • Allows achieving a trade-off between network performance and size • Design Methodology Two (DM-2) – A researcher may design different size networks in no particular order • May be quickly pursued for only a few networks • Possible that design could be significantly improved with a bit more attention to network design
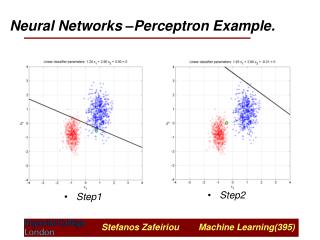
Three Types of Networks Defined • Randomly Initialized (RI) Networks – No members of this set of networks have any initial weights and thresholds in common. Practically this means that the initial random number seeds (IRNS) are widely separated. Useful when the goal is to quickly design one or more networks of the same or different sizes whose weights are statistically independent of each other. Can be designed using DM-1 or DM-2 • Common Starting Points Initialized (CSPI) Networks – When a set of networks are CSPI, each one starts with the same IRNS. These networks are useful when it is desired to make performance comparisons of networks that have the same IRNS for the starting point. Can be designed using DM-1 or DM-2 • Dependently Initialized (DI) Networks – A series of networks are designed with each subsequent network having one or more hidden units than the previous network. Larger size networks are initialized using the final weights and thresholds from training a smaller size network for the values of the common weights and thresholds. DI networks are useful when the goal is a thorough analysis of network performance versus size and are most relevant to being designed using DM-1.
Network Properties • Theorem 3.1: If two initial RI networks (1) are the same size, (2) have the same training data set and (3) the training data set has more than one unique input vector, then the hidden unit basis functions are different for the two networks. • Theorem 3.2: If two CSPI networks (1) are the same size and (2) use the same algorithm for processing random numbers into weights, then they are identical. • Corollary 3.2: If two initial CSPI networks are the same size and use the same algorithm for processing random numbers into weights, then they have all common basis functions.
Problems with MLP Training • Non-monotonic Ef(Nh) • No standard way to initialize and train additional hidden units • Net control parameters are arbitrary • No procedure to initialize and train DI networks • Network linear and nonlinear component interference
Tasks Performed in this Research • Analysis of RI networks • Improved Initialization in CSPI networks • Improved initialization of new hidden units in DI networks • Analysis of separating mean training approaches
CSPI and CSPI-SWI Networks • Improvement to RI networks Each CSPI network starts with same IRNS • Extended to CSPI-SWI (Structured Weight Initialization) networks • Every hidden unit of the larger network has the same initial weights and threshold values as the corresponding units of the smaller network • Input to output weights and thresholds are also identical • Theorem 5.1: If two CSPI networks are designed with structured weight initialization, the common subset of the hidden unit basis functions are identical. • Corollary 5.1: If two CSPI networks are designed using structured weight initialization, the only initial basis functions that are not the same are the hidden unit basis functions for the additional hidden units in the larger network. • Detailed flow chart for CSPI-SWI initialization in dissertation
CSPI-SWI Examples fm twod
DI Network Development and Evaluation • Improvement over RI, CSPI and CSPI-SWI networks • The values of the common subset of the initial weights and thresholds for the larger network are initialized with the final weights and thresholds from a previously well-trained smaller network • Designed with DM-1 • Single network designs networks are implementable • After training, testing is feasible on a different set of data set
Basic DI Network Flowgraph Create an initial network with Nh hidden units Train this initial network Nh Nh+p Yes Nh>Nhmax ? Stop No Initialize new hidden units Nh-p+1 j Nh woh(k,j) 0, 1 k M whi(j,i) RN(ind+), 1 i N+1 Net control for whi(j,i), 1 i N+1 Train new network
Properties of DI Networks • Eint(Nh) < Eint(Nh-p) • Ef(Np) curve is monotonic non-increasing (i. e., Ef(Nh) Ef(Nh-p)) • Eint(Nh) = Ef(Nh-p)
Performance Results for DI Networks with Fixed Iterations fm twod F24 F17
RI Network and DI Network Comparison (1) DI network: standard DI network design for Nh hidden units (2) RI type 1: RI networks were designed using a single network for each value of Nh and every network of size Nh was trained using the value of Niter that the corresponding network was trained with for the DI network. (3) RI type 2: RI networks were designed using a single network for each value of Nh and every network was trained using the total number of Niter that was used for the entire sequence of DI networks. This can be expressed by This results in the RI type 2 network actually having a larger value of Niter than the DI network.
Separating Mean Processing Techniques • Bottom-Up Separating Mean • Top-Down Separating Mean
) ) ) - - t t t x , t t p p p p p p Bottom-Up Separating Mean Generate new desired output vector Generate linear Train MLP mapping results using new data • Basic Idea: • A linear mapping is removed from the training data. • The nonlinear fit to the resulting data may perform better.
Bottom-up Separating Mean Results fm power12 single2
Top-Down Separating Mean • Basic Idea: • If we know which subsets of inputs and outputs have the same means in Signal Model 2 and 3, we can estimate and remove these means. • Network performance is more robust.
Separating Mean Results power12
Conclusions • On the average CSPI-SWI networks have more monotonic non-increasing MSE versus Nh curves than RI networks • MSE versus Nh curves are always monotonic non-increasing for DI networks • DI network training was improved by calculating the number of training iterations and limiting the amount of training used for previously trained units • DI networks always produce more consistent MSE versus Nh curves than RI, CSPI and CSPI-SWI networks • Separating mean processing using both a bottom-up and top-down architecture often produce improved performance results • A new technique was developed to determine which inputs and outputs are similar to use for top-down separating mean processing