Download
1 / 1
10 likes | 104 Views
Development of a robust end-user application for vision based positioning and navigation Eric McClean, Cao Yanpeng and John McDonald. Introduction.

E N D
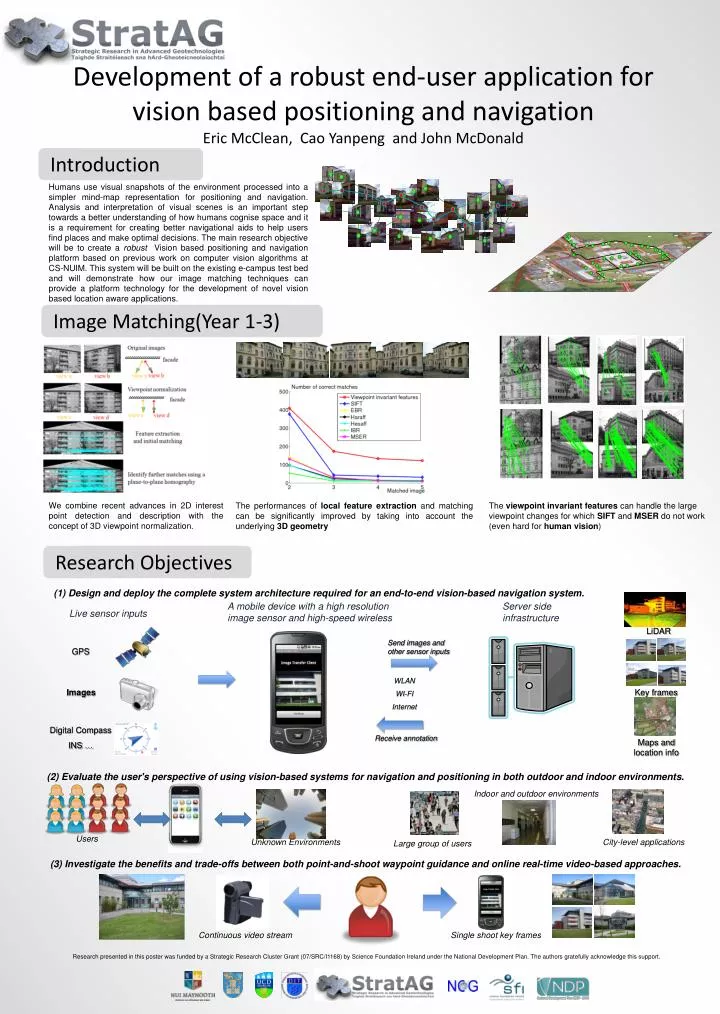
Development of a robust end-user application for vision based positioning and navigation Eric McClean, Cao Yanpeng and John McDonald Introduction Humans use visual snapshots of the environment processed into a simpler mind-map representation for positioning and navigation. Analysis and interpretation of visual scenes is an important step towards a better understanding of how humans cognise space and it is a requirement for creating better navigational aids to help users find places and make optimal decisions. The main research objective will be to create a robust Vision based positioning and navigation platformbased on previous work on computer vision algorithms at CS-NUIM. This system will be built on the existing e-campus test bed and will demonstrate how our image matching techniques can provide a platform technology for the development of novel vision based location aware applications. Image Matching(Year 1-3) We combine recent advances in 2D interest point detection and description with the concept of 3D viewpoint normalization. The performances of local feature extraction and matching can be significantly improved by taking into account the underlying 3D geometry The viewpoint invariant features can handle the large viewpoint changes for which SIFT and MSER do not work (even hard for human vision) Research Objectives (1) Design and deploy the complete system architecture required for an end-to-end vision-based navigation system. A mobile device with a high resolution image sensor and high-speed wireless Server side infrastructure Live sensor inputs LiDAR Send images and other sensor inputs GPS WLAN WI-FI Internet Images Key frames Digital Compass INS … Receive annotation Maps and location info (2) Evaluate the user's perspective of using vision-based systems for navigation and positioning in both outdoor and indoor environments. Indoor and outdoor environments Users Unknown Environments City-level applications Large group of users (3) Investigate the benefits and trade-offs between both point-and-shoot waypoint guidance and online real-time video-based approaches. Continuous video stream Single shoot key frames Research presented in this poster was funded by a Strategic Research Cluster Grant (07/SRC/I1168) by Science Foundation Ireland under the National Development Plan. The authors gratefully acknowledge this support. Research presented in this poster was funded by a Strategic Research Cluster Grant (07/SRC/I1168) by Science Foundation Ireland under the National Development Plan. The authors gratefully acknowledge this support.