Download
1 / 1
10 likes | 127 Views
User-Environment Based Navigation Algorithm for an Omnidirectional Passive Walking Aid System. Naemeh Nejatbakhsh , Tohoku University, Japan Kazuhiro Kosuge, Tohoku University, Japan. Omni RT Walker-II (ORTW-II) is a passive type omnidirectional walking aid system.

E N D
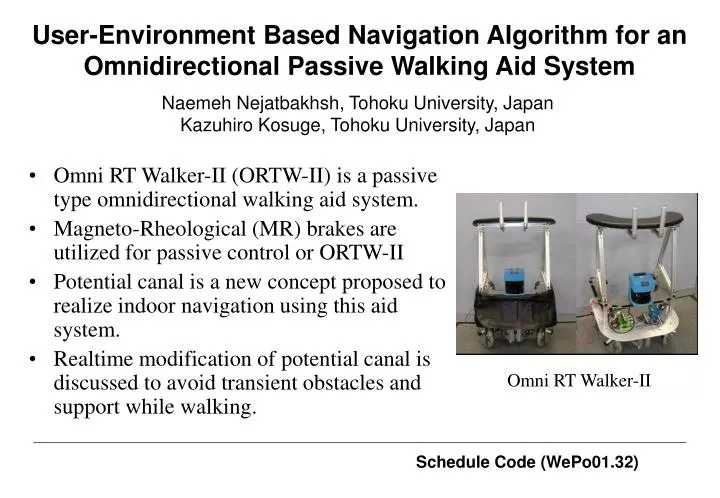
User-Environment Based Navigation Algorithm for an Omnidirectional Passive Walking Aid System Naemeh Nejatbakhsh, Tohoku University, JapanKazuhiro Kosuge, Tohoku University, Japan • Omni RT Walker-II (ORTW-II) is a passive type omnidirectional walking aid system. • Magneto-Rheological (MR) brakes are utilized for passive control or ORTW-II • Potential canal is a new concept proposed to realize indoor navigation using this aid system. • Realtime modification of potential canal is discussed to avoid transient obstacles and support while walking. Omni RT Walker-II Schedule Code (WePo01.32)