Download
1 / 26
270 likes | 415 Views
Unconditioned stimulus (food) causes unconditioned response (saliva) Conditioned stimulus (bell) causes conditioned response (saliva). Rescola-Wagner Rule. V=wu, with u stimulus (0,1), w weight and v is predicted response. Adapt w to minimize quadratic error.

E N D
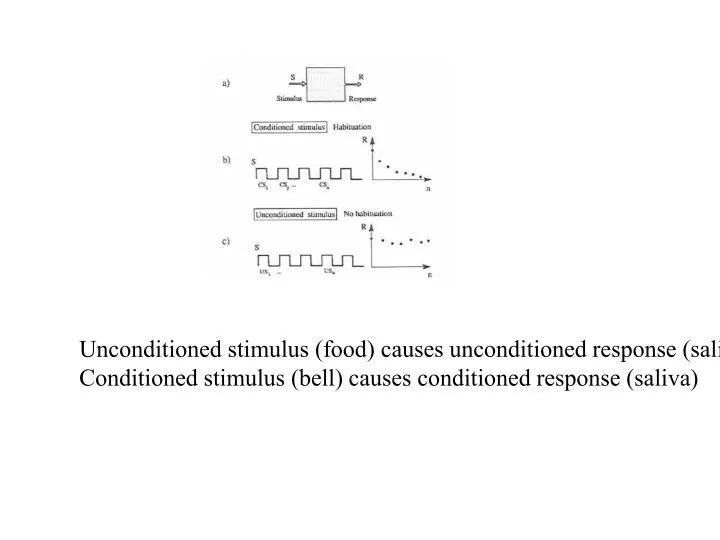
Unconditioned stimulus (food) causes unconditioned response (saliva) Conditioned stimulus (bell) causes conditioned response (saliva)
Rescola-Wagner Rule • V=wu, with u stimulus (0,1), w weight and v is predicted response. Adapt w to minimize quadratic error
Rescola Wagner rule for multiple inputs can predict various phenomena: Blocking: learned s1 to r prevents learning of association s2 to r Inhibition: s2 reduces prediction when combined with any predicting stimulus
Temporal difference learning • Interpret v(t) as ‘total future expected reward’ • v(t) is predicted from the past
After learning delta(t)=0 implies: v(t=0) is sum of expected future reward v(t) constant, thus expected reward r(t)=0 v(t) decreasing, positive expected reward
Explanation fig 9.2 Since u(t)=delta(t,0), Eq. 9.6 becomes: v(t)=w(t) Eq. 9.7 becomes delta w(t)= \epsilon delta(t) Thus, delta v(t)= \epsilon(r(t)+v(t+1)-v(t)) R(t)=delta(t,T) Step 1: only change is v(T)=v(T)+epsilon Step 2: change v(T-1) and v(T) Etc.
Dopamine • Monkey release button and press other after stimulus to receive reward. A: VTA cells respond to reward in early trials and to stimulus in late trials. Similar to delta in TD rule fig. 9.2
Dopamine • Dopamine neurons encode reward prediction error (delta). B: witholding reward reduced neural firing in agreement with delta interpretation.
Static action choice • Rewards result from actions • Bees visit flowers whose color (blue, yellow) predict reward (sugar). • M are action values, encode expected reward. Beta implements exploration
The indirect actor model Learn the average nectar volumes for each flower and act accordingly. Implemented by on-line learning. When visit blue flower And leave yellow estimate unchanged Fig: rb=1, ry=2 for t=1:100 and reversed For t=101:200. A: my, mb; B-D Cumulated reward low beta (B), high Beta (C,D).
Bumble bees • Blue: r=2 for all flowers, yellow: r=6 for 1/3 of the flowers. When switched at t=15 bees adapt fast.
Bumble bees • Model with m=< f(r)> with f concave, so that mb=f(2) larger than my=1/3 f(6)
Direct actor Stochastic gradient ascent: Fig: two sessions as in fig. 9.4 with good and Bad behaviour. Problem is size m prevents Exploration.
Sequential action choice • Reward obtained after sequence of actions • Credit assignment problem.
Sequential action choice • Policy iteration: • Critic: use TD eval. v(state) using current policy • Actor: improve policy m(state)
Policy evaluation • Policy is random left/right at each turn. • Implemented as TD:
Policy improvement • Can be understood as policy gradient rule: where we replace ra-r by And m becomes state dependent. Example: current state is A
Policy improvement • Policy improvement changes policy, thus reevaluate policy for proven convergence • Interleaving PI and PE is called actor-critic • Fig: AC learning of maze. NB learning at C is slow.
Generalizations • Discounted reward: • TD rule changes to • TD(lambda): apply TD rule not only to update value of current state but also of recently past visited states. TD(0)=TD, TD(1)=updating all past states.
Water maze • State u = 493 place cells, 8 actions • AC rules:
Comparing rats and model • RL predicts well initial learning, but not change to new task.
Markov decision process • State transitions P(u’|u,a). • Absorbing states: • Find M such that • Solution: solve Bellman equation
Policy iteration • Is Policy evaluation + policy improvement • Evaluation step: Find value of a policy M: • RL evaluates rhs stochasticly V(u)=v(u) +eps delta(t)
Improvement step: maximize {...} wrt a Requires knowledge of P(u’|u,a). Earlier formula can be derived as stochastic version