Download
1 / 58
580 likes | 794 Views
Introduction to Robots and Multi-Robot Systems Agents in Physical and Virtual Environments. Lecture 3: Behavior Selection Gal A. Kaminka galk@cs.biu.ac.il. Previously, on Robots …. Multiple levels of control: Behaviors. Plan changes. Identify objects. Monitor Change. Map. Explore.

E N D
Introduction to Robots and Multi-Robot SystemsAgents in Physical and Virtual Environments Lecture 3: Behavior Selection Gal A. Kaminka galk@cs.biu.ac.il
Previously, on Robots … Multiple levels of control: Behaviors Plan changes Identify objects Monitor Change Map Explore Wander Avoid Object
Subsuming Layers • How to make sure overall output is coherent? • e.g., avoid object is in conflict with explore • Subsumption hierarchy: Higher levels modify lower Map Explore Wander Avoid Object
This week, on Robots …. • Behavior Selection/Arbitration • Activation-based selection • winner-take-all selection • argmax selection (priority, utility, success likelihood, … ) • Behavior networks • Goal-oriented behavior-based control • Takes a direct aim at key weaknesses of reactive approach • Behavior hierarchies
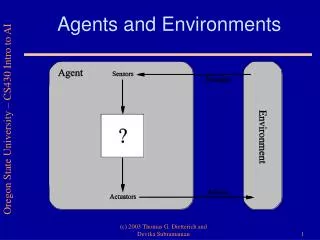
Behavior Selection (Arbitration) • One behavior takes over completely • All sensors, actions controlled by the behavior • Behaviors compete for control • Key questions: • How do we select the correct behavior? • When do we terminate the selected behavior?
Maes’ Actions Selection Mechanism (MASM) Some key highlights: • Merges some planning with behavior-based control • Goal-oriented, allows predictions • Responsive, allows reactivity • “Speed vs. thought” trade-off • Lots of number-hacking • A later article addressed this issue with learning • However, complex environment may suffer from this
Overall Structure Behavior Goal • Behaviors: preconditions, delete/add lists, activation • Activation links spread positive and negative activation Sensor Behavior Behavior Sensor Behavior Behavior Goal Behavior Sensor Behavior
Behaviors • Similar to a fully-instantiated planning operator • No variables (i.e, pick-up-A, not pick-up(A) • Preconditions (what must be true to be executable) • Add/delete list (what changes once behavior executes) Behavior
Connecting Behaviors Activation: • Sensors to behaviors with matching preconditions Behavior Sensor
Connecting Behaviors Behavior Activation: • Sensors to behaviors with matching preconditions • Add lists to behaviors with matching preconditions Behavior Behavior Sensor
Connecting Behaviors (Backward) Behavior Goal Activation: • Goals to behaviors with matching add lists • Behaviors to behaviors with matching add lists Behavior Behavior Sensor
Connecting Behaviors (Backward) Behavior Goal Advantages: • Goal-orientedness (goal drives behaviors) • Reactivity (sensors drive behaviors) • Parameterized! Behavior Behavior Sensor
Handling Conflicts Behavior Goal • Conflicting behaviors inhibit each other • This is a winner-take-all configuration Behavior Behavior Sensor Sensor Behavior Behavior Goal Behavior Sensor
Winner Take All • A very basic structure in neural networks • Relies on recurrence • Key idea: Nodes compete by inhibiting each other • After some cycles, winner emerges • This is useful in many neural models of behavior
Basic Structure • Each node excited by incoming information • Each node’s activation inhibits its competitors 1 + + - - 2 + + - - 3 + +
First activation Darker == more activation (2 is most active, 1 least) 1 + + - - 2 + + - - 3 + +
After a few cycles • 3 and 2 stronger than 1, so 1 quickly deactivates • 2 slightly stronger than 3, so 3 slowly deactivates 1 + + - - 2 + + - - 3 + +
After a few more cycles • Once 1 is out of picture, only 2 and 3 compete • 2 becomes stronger: a weaker 3 inhibits 2 less 1 + + - - 2 + + - - 3 + +
Until finally…. • Only output from 2 remains 1 + + - - 2 + + - - 3 + +
Winner Take All • Output from winning node ends up being used • Typically, if over a threshold • Once node becomes active, never lets in any other • A basic problem. • Standard solutions: reset after some time, decay, … • This mechanism can be used to solve competition • Activation is key feature/requirement
Running a behavior network Behavior Goal • Let activation spread for a while, wait for threshold • Once behavior over threshold, execute it • Reset activation after it’s done Behavior Behavior Sensor Sensor Behavior Behavior Goal Behavior Sensor
Advantages • We’ve discussed planned vs. reactive behavior • Threshold value changes “speed vs. thought” • Larger threshold, more behaviors involved before selection • Small threshold, less likely to find optimal chain • This is not hybrid architecture—really something new!
Criticisms Where will this fail? Succeed? What needs improvement? What does not? What tasks is it good for? As scientists, you must always ask yourself these questions
Protected Goals • Sussman Anomaly: • Given: A on B, B on table, C on table • Do: A on B, B on C, C on table • No way to do this without undoing a subgoal • If one is not careful, might go into thrashing • Take off A, put A back, Take off A, …. • Maes added mechanism for protected goals • Not clear where protection comes from
Other problems with MASM • No variables Blow up in the number of behaviors • Thrashing: Behavior resets, then re-selected • Bug in activation algorithm: • Activation from goals is divided by number of goals • Thus a behavior satisfying more goals is not preferred • Additional minor issues like this found, corrected later • Tyrell 1993,1994, Dorer 1999, Blumberg 1994, …
Reminder • We are talking about behavior selection • Multiple behaviors exist • Question is which one to choose • Behaviors compete for control of robot • Behavior networks have activation: • Goal priority “meets” sensor data (preconditions, effects) • Winner-take-all selection
Activation-based selection • For each behavior, build an activation function • How useful it is (utility, value) • How urgent it is (priority) • How likely it is to succeed (likelihood of success) • How much it matches current state (applicability) • …. • Can of course combine these (e.g., utility X priority) • Select behavior with top activation • Let it run • Re-evaluate all activations
Formal behavior selection • Behaviors are arranged in a DAG <B,E> • DAG: Directed Acyclic Graph • B set of behaviors (vertices) • E set of edges (a,b), where a, b in B. • The graph is structured hierarchically: • Single root behavior is most general • leaf behaviors correspond to primitive actions • A path from every behavior to at least one primitive behavior • children(b) = { all behaviors a, such that (b,a) is in E }
Hierarchical behaviors • The root behavior is always active • An active behavior with no active child must select one • An active behavior can decide to deactivate itself WinGame Play Interrupt Attack-Center Zone Defense Attack Pincer Move Kick Pass Clear Turn
argmax selection • At any given time, select behavior whose • priority • value • likelihood of success • applicability is greatest • No sequence of behaviors known in advance • Many instances of behaviors can co-exist, compete
Formally …. • f(b) be a function which gives the behavior’s activation • Then the arbitration result is: argmaxc (f(c)), where c in children(b) • For instance, to choose by value, argmaxc (value(c)) • Or, to choose by priority, argmaxc (priority(c) • Or decision-theoretic choice, argmaxc (probability(c) * value(c))
Subsumption as argmax selection • Subsumption level of behavior b, given by level(b) • Applicability of behavior b, given by app(b) --- 0 or 1 • Subsumption arbitration: argmaxb (app(b) * level(b)) Map Explore Wander Avoid Object
Case Study: HandleBall Arbitrator (ChaMeleons’01) • HandleBall behavior triggered when player has ball • Must select between multiply-instantiated children: • shoot on goal, pass for shot, pass forward, dribble to goal • dribble forward, clear, pass to closer, …. • We defined a complex arbitrator combining: • priority, and • likelyhood of success
sensor value around threshold sensor value around threshold sensor value around threshold sensor value around threshold “Number-hacking”: Thrashing de-selection and re-selection of behaviors the time
“Number-hacking”: Sensitivity • Sensitivity to specific values, ranges • Manually adjusting values by 0.1 to get a wanted result… • Where do the numbers come from? Learning? • e.g., programmer forgot a range of values? • e.g., programmer needs to extend range
State-Based Selection • State-based selection • Look at world and internal state to make selection • Behaviors as operators? Almost. • Pre-conditions, termination-conditions • Selection control rules (non-numeric preferences, priorities) • Finite state machines and hierarchical machines
State-Based Behavior Selection • Elements from reactive control, but with internal state • Quick response to sensor readings • Sensor-driven operation • Behaviors maintain internal state • e.g., previously-executed behaviors • e.g., previous sensor readings • …
Behaviors as operators • Conditions: • Preconditions: When is it applicable? • Termination conditions: When is it done? • Conditions test sensors, internal state • Must maintain World Model • Can be simple (e.g., vector of sensor readings) • Or complex (e.g., internal variables, previous readings)
State-Based Selection: Architecture Behavior Behavior Command Scheduling World Model (beliefs) Behavior Behavior
State-Based Selection: Architecture Behavior Behavior Command Scheduling World Model (beliefs) Behavior Behavior
State-Based Selection: Architecture Behavior Behavior Command Scheduling World Model (beliefs) Behavior Behavior
Conflicting Behaviors What if more than one behavior matches? Behavior Behavior Command Scheduling World Model (beliefs) Behavior Behavior
Preference Rules • Prefer one behavior over another • Provide “local guidance” • Do not consider all possible cases, nor global ranking • Test world model (which also records behaviors) Preference Rules Behavior Behavior Command Scheduling World Model (beliefs) Behavior Behavior
What’s in a world model? Preference Rules Behavior Behavior Command Scheduling World Model (beliefs) Behavior Behavior
What’s in a world model? • A vector of sensor readings • Distance front = 250 • Light Left = Detected • Battery = Medium level • A vector of virtual sensors • Distance front < 90 AND light front • Average front distances = 149.4 Simple Complex
What’s in a world model? • A vector processed data • Estimated X, Y from detected landmarks • Seen purple blob at pixel 2,5 • Communication from teammate • A vector of world models • Position of opponent 2 seconds ago • My position 10 seconds ago Simple Complex
Hierarchical Behaviors • Hierarchies allow designer to build reusable behaviors • At any given moment, a path is selected • All behaviors in the path are active • May issue action commands • Monitor sensors • This is different from a function call stack • What happens when behavior terminates?
Case Study: ModSAF • Preference rules manage high-priority interrupts • Preconditions dictate ordering Execute Mission Fly Flight Plan Halt Wait-at-Point Join Scout Engage Fly Route Land Find Position NOE Low Contour Unmask Shoot