Download
1 / 7
70 likes | 74 Views
This document outlines the tests, procedures, and conditions required for the commissioning of Roman Pot hardware. It also discusses the integration, cabling, and installation scheduling processes. Additionally, it covers the operation of movable devices and the interlock systems for TOTEM detectors.

E N D
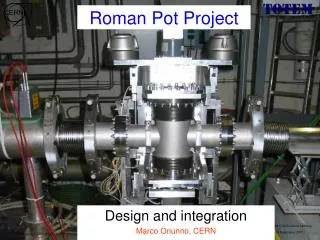
Roman Pot Operation D. Macina TS/LEA
Roman Pot Hardware Commissioning • What tests • the procedures and the sequence • How • what conditions are required to start • what conditions determine it is finished • what conditions are required during the tests • How long it takes for the whole procedure TOTEM defines and carries out • Condition means • Access • Infrastructure (powering, ventilation, ..) • Support, state and requirements from: • Other systems (vacuum, controls, • cryogenics,…) • Other groups (operation,..) HC Team ensures that the conditions required are satisfied and provides the HC schedule according to the conditions above • Integration work(studies to verify if all this fits, can be transported, can be installed in place) TS/IC • Cabling(signal and power, fibers,..) TS/EL • Transport TS/IC • Installation SchedulingTS/IC Sorted out prior to the commissioning exercise TOTEM Meeting
Roman Pot Operation • The following issues need to be discussed in the Machine Protection and LEADE WG and specifications/recommendations approved by the appropriate procedures/Committees: • Define a safe operation • Define the responsibilities for the operation of the RP • Define the signals exchange between TOTEM and CCC • Define the interlock system for TOTEM detectors TOTEM Meeting
Beam abort and inhibit Talk from J. Wenninger at LEADE • Any system connected to the beam interlock system that : • wants to abort the beam, • is not ready for beam ( beam inhibit) • There are two Interlock systems: • Hardware Beam Interlock System: failsafe, fast ( max. 3 turns between the detection of a beam dump request and the completion of a beam dump) • Software Interlock System (no failsafe but much more flexible, reaction time from ~ milliseconds to seconds) TOTEM Meeting
Experiments • Each experiment can provide user input signals to the beam interlock system : • Background / radiation interlock. • Movable device interlock (VELO, RPs). • This user signal must be used to : • Inhibit injection / SPS extraction if the detector is not ready for beam. • Request a beam dump if radiation levels, rates… are so high that the detector may be damaged. • Request a beam dump in case of incorrect positioning of movable devices. • In addition, software interlocks could / should be generated. Separate signals if possible ? TOTEM Meeting
Operation of movable devices • Movable devices should only leave their ‘OUT’ position with ‘stable beams’ : • Beams are ramped & squeezed @ physics energy. • Beam parameters are OK according to C3. • Collimators and absorbers in position. • … Please note that stable beams does NOT mean that we will not continue tuning the beams, collimators…. Failures leading to a beam dump within 3 turns are always possible. • Beams should be dumped / not injected if a movable device is not ‘OUT’ and the above conditions are not true. TOTEM Meeting
Roman pots • Roman pots are special since they can ‘compete’ with the collimators in terms of beam scraping – must ensure they stay in the shadow of the collimators. • Proposal 1 (strongly encouraged by collimation WG) : • Motors and control of roman pots are identical (or fully compatible) to collimator system. • RPs, collimators and absorbers are controlled from a single place to ensure fully consistent positions. • Generation of interlocks is taken care by collimator control system. • Proposal 2 : • RP control must be a ‘slave’ of the collimation control system that dictates position ranges and gives green light for movements. • Proper interlock generation is under the responsibility of experiment. TOTEM Meeting