Download
1 / 1
10 likes | 120 Views
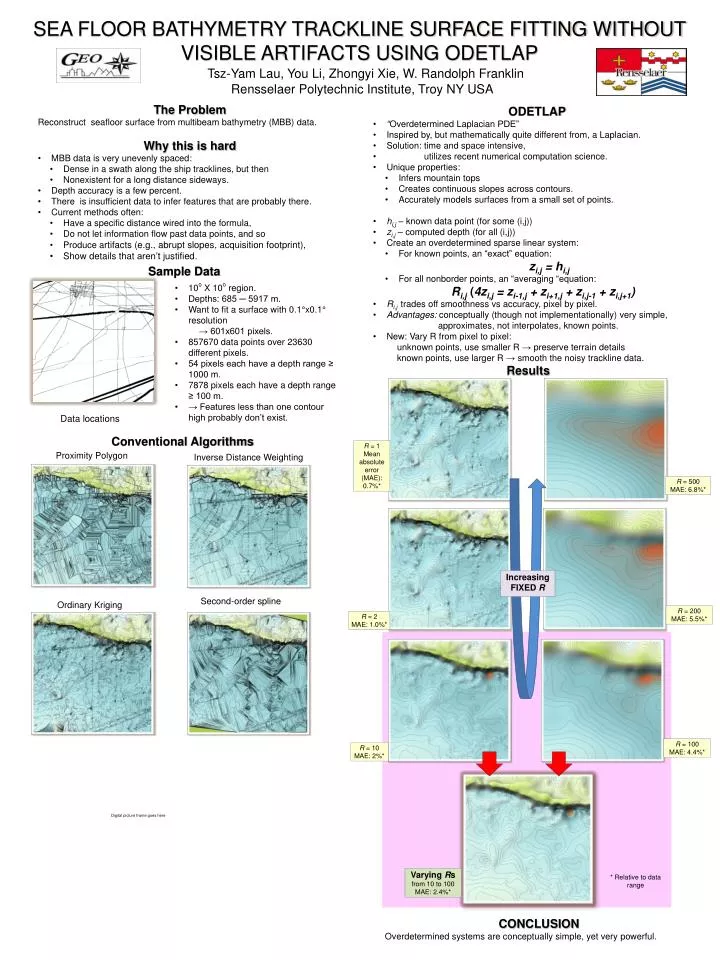
SEA FLOOR BATHYMETRY TRACKLINE SURFACE FITTING WITHOUT VISIBLE ARTIFACTS USING ODETLAP. Tsz -Yam Lau, You Li, Zhongyi Xie , W. Randolph Franklin Rensselaer Polytechnic Institute, Troy NY USA. The Problem Reconstruct seafloor surface from multibeam bathymetry (MBB) data.

E N D
SEA FLOOR BATHYMETRY TRACKLINE SURFACE FITTING WITHOUT VISIBLE ARTIFACTS USING ODETLAP Tsz-Yam Lau, You Li, ZhongyiXie, W. Randolph Franklin Rensselaer Polytechnic Institute, Troy NY USA The Problem • Reconstruct seafloor surface from multibeam bathymetry (MBB) data. • Why this is hard • MBB data is very unevenly spaced: • Dense in a swath along the ship tracklines, but then • Nonexistent for a long distance sideways. • Depth accuracy is a few percent. • There is insufficient data to infer features that are probably there. • Current methods often: • Have a specific distance wired into the formula, • Do not let information flow past data points, and so • Produce artifacts (e.g., abrupt slopes, acquisition footprint), • Show details that aren’t justified. • ODETLAP • “OverdeterminedLaplacian PDE” • Inspired by, but mathematically quite different from, a Laplacian. • Solution: time and space intensive, • utilizes recent numerical computation science. • Unique properties: • Infers mountain tops • Creates continuous slopes across contours. • Accurately models surfaces from a small set of points. • hi,j – known data point (for some (i,j)) • zi,j– computed depth (for all (i,j)) • Create an overdetermined sparse linear system: • For known points, an “exact” equation: • zi,j = hi,j • For all nonborder points, an “averaging “equation: • Ri,j (4zi,j = zi-1,j + zi+1,j + zi,j-1 + zi,j+1) • Ri,jtrades off smoothness vs accuracy, pixel by pixel. • Advantages: conceptually (though not implementationally) very simple, • approximates, not interpolates, known points. • New: Vary R from pixel to pixel: • unknown points, use smaller R → preserve terrain details • known points, use larger R → smooth the noisy trackline data. Sample Data • 10oX 10oregion. • Depths: 685 ─ 5917 m. • Want to fit a surface with 0.1°x0.1° resolution • → 601x601 pixels. • 857670 data points over 23630 different pixels. • 54 pixels each have a depth range ≥ 1000 m. • 7878 pixels each have a depth range ≥ 100 m. • → Features less than one contour high probably don’t exist. Results Data locations Conventional Algorithms R= 1 Mean absolute error (MAE): 0.7%* Proximity Polygon Inverse Distance Weighting R= 500 MAE: 6.8%* Increasing FIXED R Second-order spline Ordinary Kriging R= 200 MAE: 5.5%* R= 2 MAE: 1.0%* R= 100 MAE: 4.4%* R= 10 MAE: 2%* Digital picture frame goes here Varying Rs from 10 to 100 MAE: 2.4%* * Relative to data range CONCLUSION Overdetermined systems are conceptually simple, yet very powerful.