Download
1 / 20
200 likes | 430 Views
Pipelining. Chapter 6. Introduction to Pipelining. Pipelining is overlapping of tasks to realize improvement in overall performance Consider 4 sub-tasks making up a major task. Lets consider the example given in your text: wash, dry, iron and fold clothes (W D I F)

E N D
Pipelining Chapter 6
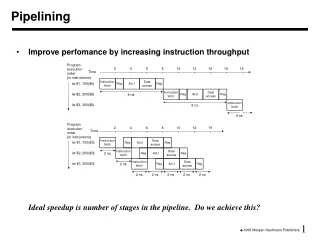
Introduction to Pipelining • Pipelining is overlapping of tasks to realize improvement in overall performance • Consider 4 sub-tasks making up a major task. Lets consider the example given in your text: wash, dry, iron and fold clothes (W D I F) • Now consider n-students want to do this WDIF operation this weekend. • WDIFWDIFWDIFWDIF • WDIF • WDIF • WDIF • WDIF
Instruction Cycle • Fetch: Fetch instruction from memory • Read: Read registers while decoding the instructions • Execute: Execute the operation or calculate an address • Access Memory: Read memory • Write: Write result to register • Assume each of the above operation takes clock cycle. • Assume read and write to register happen in different halves of the cycle. Now we can overlap register read and write.
Pipelining • Time between instructions in pipelined = time between instructions in non-pipelined / # pipelined stages • We want a balanced set of instructions to realized best performance by pipelining • Lets examine the MIPS instruction pipelining page: 373 • How do we design instruction set for pipelining? • MIPS: • instructions of same length • Only few instruction formats • Memory operands only in load and store • Operands must be aligned in the memory
Life is not simple • It is full of hazards • There are situations in pipelining where the next instruction cannot execute in the following cycle. • These are called hazards and there are three different types. • Structural hazards: instruction fetch and data access of memory • Data hazards: • add $s0,$t0,$t1 • sub $t2,$s0,$t3 • Solution: data forwarding • Control hazards: branch…delayed branch, rearranging instructions • Lets look at some examples
How to address pipeline hazards? • Stalls in the pipeline occur when instructions due to • structural hazards (two instructions needing memory at the same time), • control hazards (branch instruction), and • data hazards (results from an instruction needed as data in another instruction). • Solution 1: Forwarding… need to be made during the design of the datapath • Solution 2: introducing a delay or bubble in the pipeline; this is usually done after load and store; delayed load; • Example:
Rendering Code to Avoid Pipeline Stalls Original code Rearranged code • A = B + E • C = B + F lw $t1,0(t0) lw $t2,4(t0) add $t3, $t1, $t2 sw $t3, 12($t0) lw $t4, 8($t0) add $t5, $t1, $t4 sw $t5,16($t0) • A = B + E • C = B + F lw $t1,0(t0) lw $t2,4(t0) lw $t4, 8($t0) add $t3, $t1, $t2 sw $t3, 12($t0) add $t5, $t1, $t4 sw $t5,16($t0)
Control Hazards • There are benchmark program that are used for evaluating the performance of the hardware called SPEC benchmarks • SPECint2000 is one of them. According to this benchmark 13% of the instructions executed are branch. • After a branch we a nop to stall; 13% of the time one extra cycle is added to the time. • Also the instructions loaded into the pipeline need to flushed if the branch is taken. • Branch prediction is another solution: based on the prediction you may want to stall or prefetch.
Revisit and redesign Datapath • Lets redesign our datapath to allow pipelined execution: • See. Figs., 6.9, 6.10, 6.11…
Issues: how to accommodate more than 1 instruction in the datapath?
Add buffer before each stage • IF/ID buffer : 64 bits • ID/EX buffer : 128 bits • EX/MM buffer : 97 bits : 1 for carry/zero • MM/WB buffer: 64 bits • Fig. 6.9 (without control) • Reason out the size of these pipeline registers • How about load register address in a load instruction? • Add 5 more bits to choose the load register; this extra bits will be in ID/EX, EX/MM, MM/WB • See fig. 6.17
Pipelined execution instruction • Instructions: • lw $t1,20($t2) • sub $t3, $t4, $t5 • add $t6, $t5,$t7 • lw $t8,24($t2) • add $t9,$t10,$t11 • Lets draw the multi-cycle pipeline diagram of five instructions. • Fig,6.19, 6.20, 6.21 • Fig. 6.27 with control line buffers at ID/EX and EX/MM
Pipelined control • Control gets complex • Remember, life is not simple • Consider the sequence given below; lets analyze the data forwarding requirement of these instructions. • sub $t2,$t1,$t3 • and $t12, $t2,$t5 • or $t13,$t6,$t2 • add $t14,$t2,$t2 • sw $t15,100($t2) • Fig. 6.28 • How to solve this dependency problem? Detect dependency and resolve at the hardware level.
Pipelined Hazard Management • Data forwarding: conflict at ALU (EX) input operands; R-type instructions • We examined data forwarding as a solution. • How? • Detect data hazards that can be mitigated by data forwarding (logic functions using data in the buffers) • Forward the data to the ALU from EX/MM and MM/WB buffer to EX • Select the operand to ALU (EX) using the logic in step 1
When forwarding does not work? • How about a register trying to read after a load instruction? • Consider: lw $t2,20($t1) and $t4,$t2,$5 or $t8,$t2,$t6 add $t9,$t4,$t2 slt $t1,$t6,$t7 • Since the dependence between the load and the following instruction (and) goes backward in time, this hazard cannot be covered by forwarding. • Solution: introduce stalls in the pipeline.
How to detect this hazard? • If ( ID/EX.MemRead and ((ID/EX.RegisterRt = IF/ID.RegsiterRs) or (ID/Ex.RegsiterRt = IF/ID.RegsiterRt))) stall the pipeline • If the current instruction at ID/EX is load (i.e. memory read instruction) and if the next is dependent on the register being loaded then stall the pipeline by inserting a NOP. • But how? • By deasserting all nine control signals (setting them all to 0) in the EX, MEM, WB stages, we will create a “do nothing” or nop instruction. See Fig. 6.34, 6.35
Datapath design update (6.36) • Hazard detection unit • Control unit
Branch Hazard: Control hazard • Consider the sequence given below: 40: beq $t1,$t3,28 44: and $t12,$t2,$t5 These are useless if the branch is taken 48: or $t13,$t6,$t2 52: add $t14,$t2,$t2 72: lw $t4,50($t7)
Delayed Branch • Delay the branch by introducing a NOP. • In this case logic can be added that will determine if the branch will be taken. • Accordingly you can fetch from the branch target or from the continuous sequence.
Fill NOP with useful instruction • Compiler can assist in detecting the hazards and in introducing NOPs. • It can also insert useful instruction into NOP to improve performance. • We will look at scheduling branch delay slots next class.