Download

1 / 1
10 likes | 124 Views
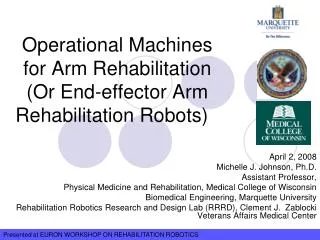
An Approach to Designing Software Safety Systems for Rehabilitation Robots. Stephen Roderick, University of Maryland, College Park Craig Carignan, Georgetown University, Washington DC. Rehabilitation robot systems should be designed as safety-critical

E N D
An Approach to Designing Software Safety Systems for Rehabilitation Robots Stephen Roderick, University of Maryland, College ParkCraig Carignan, Georgetown University, Washington DC • Rehabilitation robot systems should be designed as safety-critical • Patient is “in the loop”, both controlling and being acted upon by the robot • Design example is an exoskeleton for shoulder rehabilitation • Uses multiple standard hazard-mitigation and safety analysis methods • Based on NASA flight-certified approach WeD01.4