Download
1 / 10
100 likes | 267 Views
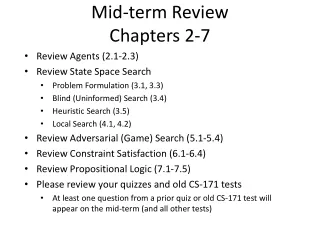
Mid Term 2. Hough Transform Line, circle fitting Generalized Hough transform Interest point, corner detectors Pixel based optical flow Token based optical flow Global motion Shape from motion Geometry of a stereo camera pair Stereopsis Fundamental matrix (estimation)

E N D
Mid Term 2 • Hough Transform • Line, circle fitting • Generalized Hough transform • Interest point, corner detectors • Pixel based optical flow • Token based optical flow • Global motion • Shape from motion • Geometry of a stereo camera pair • Stereopsis • Fundamental matrix (estimation) • Graph based image segmentation Alper Yilmaz, Fall 2004 UCF
3D Motion (Displacement and Velocity Models) • Displacement Model • Velocity Model orthographic orthographic perspective perspective Alper Yilmaz, Fall 2004 UCF
Orthographic Displacement Model Structure From MotionUsing Orthographic Displacement Model • Two step simple approach • Initialize Z and compute , , , Tx, Ty using least squares fit (x=A-1B) • Using new motion parameters refine depth Z Step 2 Step 1 Alper Yilmaz, Fall 2004 UCF
Perspective Velocity Model Structure From MotionUsing Perspective Velocity Model • Rearrange u, v: • Three step approach • Find translation that minimizes energy using search • Compute rotation • Find a 3x1 vector d perpendicular to • Multiply each side of with d. • Using others find depth Z Alper Yilmaz, Fall 2004 UCF
Stereo Geometry World point P Projection of world point on left image plane Projection of world point on right image plane xl xr Cl epipole epipole Left camera center Right camera center Cr epipolar line Alper Yilmaz, Fall 2004 UCF
Epipolar Plane Constraint • 3 vectors A, B, C on a plane satisfy • Let these vectors be T, Pl and (T-Pl): • Since Pl=R(Pr-T): • R and S in terms of camera projection matrices? Alper Yilmaz, Fall 2004 UCF
Essential Matrix • Related to camera extrinsic parameters • Defines relation between to camera coordinates Essential matrix Alper Yilmaz, Fall 2004 UCF
Fundamental Matrix • Related to both intrinsic and extrinsic camera parameters Fundamental matrix (x,y) point on left image (x’,y’) point on right image Alper Yilmaz, Fall 2004 UCF
Fundamental matrix relation Computing Components of F8-point Algorithm (Lecture 20, slides 5-10) • Select N≥8 corresponding points in both images • Normalize and scale coordinates • Construct an observation matrix • Compute OTO and its eigenspace decomposition • Select min eigenvalued eigenvector as solution • Enforce rank 2 constraint • Compute SVD and set smallest singular value to 0 Alper Yilmaz, Fall 2004 UCF
Basic Stereo disparity Alper Yilmaz, Fall 2004 UCF