Download

1 / 14
140 likes | 152 Views
In Search of Q. David Johnston (JPL). Jason Rhodes (JPL) Gary Bernstein (U Penn) Håkon Dahle (Marseille) and others from the SNAP Collaboration. Goal: to determine the error on the mean shear as a function of noise level and PSF size. Q - defined as the inverse variance on the shear

E N D
In Search of Q David Johnston (JPL) Jason Rhodes (JPL) Gary Bernstein (U Penn) Håkon Dahle (Marseille) and others from the SNAP Collaboration
Goal: to determine the error on the mean shear as a function of noise level and PSF size Q- defined as the inverse variance on the shear that you get with 1 square arcminute of data • Q is a function of the survey instrument but • not a function of survey area • The main dependence of Q should be Noise level PSF size We want to calibrate Q as a function of these two parameters So that we can compare different surveys and different Strategies.
Plan of attack Make a set of simulated images on a 2D grid of Parameters in noise level and PSF size Analyze these with various weak lensing codes To see if we can all agree and try to come up with a Universal function for Q (or close enough)
PSF Size As a measure of PSF size we use: The half light radius aka EE50 EE50 is affected more by the tails of the profile than FWHM However can be somewhat tricky to measure with pixelated data Grid of EE50 : PSF half-light radius in pixels: 2.1 3.0 2.3 2.15 2.25 2.15 2.25 in arcsec: 0.063 0.090 0.138 0.194 0.270 0.39 0.54
Noise level Noise level can be described by a “noise magnitude” Which is defined by N_mag = Z_AB - 2.5* log() Where is the noise level of the sky background Depends on : • Background noise spectrum F() (either atmosphere or zodiacal) • Total filter throughput curves T() • Collecting area of telescope A • Exposure time t Grid of Noise mags: 29.30 29.05 28.80 28.55 28.30 28.05 These are SNAP-like levels
Sets of Simulated images Simulated shapelet images similar to those made for Space STEP (Johnston, Rhodes, Massey, Ferry, High et al.) Use Hubble UDF data as training set to build Shapelet catalog Filters and PSF is taken from SNAP configuration. Charge diffusion included in PSF. The sampling is constant for all PSF sizes so PSF is identical in pixels but not in arcseconds because the pixel scale changes Degraded Hubble UDF images as sanity check (Gary B.) Noise is added, image is convolved and rebinned as needed to simulate a degraded image
Weak Lensing Codes Jason - using RRG Gary - using Bernstein & Jarvis Håkon Dahle - using modified KSB Each was asked to measure galaxy positions, Measure moments of galaxies and stars and Determine the number of usable galaxies and Also their estimate of the error on the mean shear For each image Q
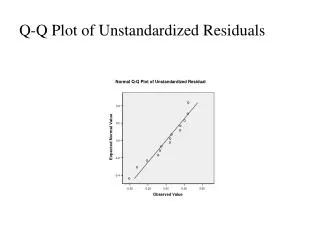
Gary’s plot Also shows the effect Of size cuts >1.1 PSF size (solid) >1.25 PSF size (dashed)
The 2D surface can be well fit by a 4 parameter model Gary’s was between the other Two and was the least noisy so we use his p[0] = 5.64680 p[1] = -0.434010 p[2] = 0.168388 p[3] = -0.178452 ln(Q) = p[0]+p[1]*x+p[2]*y+p[3]*x*y+p[4]*x^2+p[5]*y^2 where x=ln(EE50) and y=n_mag-28
"It's time to put an end to your trek through the stars" -- Q • Conclusions: • We have a decent function for the expected mean • shear error as a function of noise level and PSF size. • We can use this formulation to compare surveys and • survey configurations. • We still have some room for convergence between • methods.