Download
1 / 12
120 likes | 246 Views
IMPROVED NOISE PARAMETER ESTIMATION AND FILTERING OF MM-BAND SLAR IMAGES. Vladimir V. Lukin, Nikolay N. Ponomarenko, Sergey K. Abramov Dept of Transmitters, Receivers and Signal Processing, National Aerospace University, 17 Chkalova St, 61070, Kharkov, Ukraine,

E N D
IMPROVED NOISE PARAMETER ESTIMATION AND FILTERING OFMM-BAND SLAR IMAGES Vladimir V. Lukin, Nikolay N. Ponomarenko, Sergey K. Abramov Dept of Transmitters, Receivers and Signal Processing, National Aerospace University, 17 Chkalova St, 61070, Kharkov, Ukraine, tel. +38 057 7074841, fax +38 057 3151186, e-mails lukin@xai.kharkov.ua, uagames@mail.ru, ask379@mail.ru Benoit Vozel, Kacem Chehdi University of Rennes I, 6, Rue de Kerampont, 22 305 Lannion cedex, BP 80518, FRANCE, Tel: +33 (0)2 96 46 90 71, Fax: 33 (0)2 96 46 90 75, e-mail Benoit.Vozel@enssat.fr
Presentation outline • Motivations for research and design • Blind (automatic) techniques for determination of noise characteristics • Real life image analysis results • Modified filtering techniques • Simulation result analysis • Real life image filtering results • Conclusions
Motivations for research and design • Commonly it is supposed that noise in radar images is of multiplicative nature and additive noise component can be neglected. However, for side look aperture radar (SLAR) images, especially for MM-band (Ka-band) ones, it is not true. • Although noise in SLAR images is not very intensive, image pre-filtering is also worth performing for improving reliability of sensed surface parameter evaluation. However, majority of image filtering (denoising) techniques are designed for either reduction of additive Gaussian noise or for suppression of pure multiplicative noise. • However, determination of noise type and properties from remote sensing data at hand is not an easy task. And it is desirable to perform blind (automatic) estimation of noise characteristics. • Fortunately, such techniques have been designed recently. In this paper we present some results of applying them to real Ka- and X-band SLAR images offered to us by the Institute of Radiophysics and Electronics of UNAS and the A.I. Kalmykov Center of Earth Radiophysical Sensing.
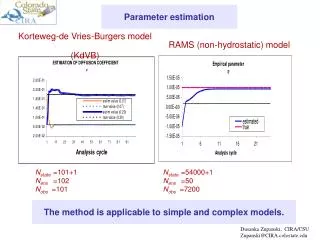
Identification of the nature of the noise and estimation of its variance: • Starting from the characterization of noises on homogeneous zones obtained by refined gravitational transform [1 ] • for additive noise : • from following property • is a “natural” estimator of the variance • the equation of the local variance according to the local mean on homogeneous zones is: • for multiplicative noise • from following property • is a “natural” estimator of the variance • the equation of the local variance according to the local mean on homogeneous zones is: • We can define local statistics on homogeneous zones by considering a local estimation kernel • Then, the local mean and local variance are given by: • with
Pseudo-Algorithm : • calculate local statistics while varying the size of the scanning window from 3x3 to 11x11 • (to get a sufficiently significant number of samples) • classify local statistics (mean, variance) into lists according to the number of pixels taken into account for calculting them • (to satisfy that the samples follow all the same law so that local statistics meaning keeps sens) • only consider the largest list of local statistics (mean, variance) • calculate the coefficients of approximation as well as the corresponding errors of approximation • decide that the noise is additive if the horizontal line generates a minimum error, or multiplicative if the minimum error is obtained by the centered parabola • [1] « UNSUPERVISED VARIATIONAL CLASSIFICATION THROUGH IMAGE MULTI-THRESHOLDING » • Luc Klaine, Benoit Vozel, Kacem Chehdi, Proceedings of 13th European Signal Processing Conference (EUSIPCO), Antalya, September 4-8 2005
Real life image analysis results • The experiments carried out have clearly shown that the considered Ka- and X-band SLAR images are corrupted by an additive mixture of multiplicative and additive noise. Both can be supposed Gaussian and, in fact, the influence of multiplicative noise is, as expected, prevailing. • The obtained estimates of noise variances for Ka-band SLAR image (in conventional 8-bit representation) are: • for multiplicative noise relative variance is of the order 0.005; • additive noise variance is about 16. • This means that for image homogeneous regions with mean intensities larger than 50…60, multiplicative noise becomes prevailing and otherwise. • Similarly, the obtained estimates of noise variances for X-band SLAR image are the following: • multiplicative noise relative variance is about 0.009; • additive noise variance is approximately equal to 64. • Thus, for the considered X-band SLAR image one can’t neglect additive noise influence as well.
Modified filtering techniques • A question is how to incorporate our knowledge on noise statistics into filtering technique? For spatially invariant DCT-based filtering there are some analogs showing a way to follow in case of signal-dependent noise. If one knows a dependence of image local variance on local mean for homogeneous regions, then for each position of a sliding block one can adjust a threshold in adaptive manner. A local DCT coefficient Wl(0;0) can serve as an estimate of local mean Il, and Wl(0;0) is calculated for each block anyway. Then, knowing a dependence of local variance on local mean (Il) and substituting Wl(0;0) instead of Il it is possible to estimate for each block. • Under assumption that additive and multiplicative noise components are mutually uncorrelated, one obtains • Then, a proposed modification (MDCT-filter) implies that a local threshold for each sliding block is adjusted as where denotes a filter parameter commonly set equal to 2.6. Similar approach can be used in setting thresholds for the corresponding modifications of edge detectors for which originally a threshold is selected proportionally to either noise variance or standard deviation.
Simulation result analysis • The simulations have been performed for a standard test image Barbara, Baboon, Lena, Goldhill, and Peppers corrupted by a mixture of additive and multiplicative noises with the same parameters and that have been observed for real life Ka-band SLAR images. • As filtering efficiency quantitative criterion we have used PSNR calculated for entire images. • For comparison purposes, we have exploited DCT based filter modifications for pure multiplicative noise (MuDCT-filter) and pure additive noise (AdDCT-filter). In the former case, a local threshold has been set as Tl=Wl(0;0)σμ. For DCT filter adjusted to pure additive noise, a threshold has been fixed and equal to σa. • Moreover, for these two DCT-filters we have varied the parameter to analyze the maximal attainable PSNR.
Simulation result analysis • As seen, PSNR for the AdDCT-filter for any does not reach PSNR for the proposed MDCT-filter. • For the MuDCT, the largest attainable PSNR can be approximately the same as for the proposed MDCT-filter. However, for different images the “optimal” for which maximal values of PSNR for MuDCT and AdDCT-filters are provided are considerably different. • In any case, the “optimal” for the MuDCT and AdDCT-filters tend to be larger than 2.6, commonly for the AdDCT-filter the “optimal” is about 4 while for the MuDCT the “optimal” is about 3. • The optimal values depend upon exact combination of values of and as well as upon an image to be filtered. If one sets Tl=Wl(0;0)σμ or σa for MuDCT and AdDCT-filters, respectively, with =2.6 as recommended, under-smoothing is observed either in image regions with either rather low or comparatively large local means. • At the same time, MDCT-filter provides approximately the same efficiency of noise suppression in image homogeneous regions irrespectively to Il (if efficiency is characterized by a ratio of σl2 before and after filtering.
Conclusions • A method for blind evaluation of additive and multiplicative noise variance is proposed. • It is established that in SLAR images multiplicative noise is dominant but additive noise component can not be neglected. • A modified DCT based filter for the considered case is designed. • It is shown that this filter can effectively remove noise and preserve useful information in SLAR images. • The method is successfully tested for real life images.