Download
1 / 1
10 likes | 179 Views
LARGE-SCALE 3D TERRAIN MODELING Thurst Area 1, The University of Tennessee Imaging, Robotics, and Intelligent Systems S. Rangan, B. Grinstead, W. Hao, A. Koschan, D. Page, M. Abidi. Motivation. High-resolution terrain models are necessary for time series and systems analysis.

E N D
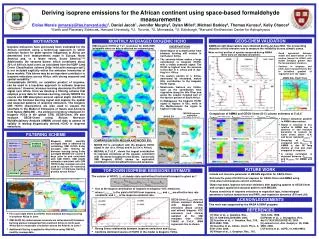
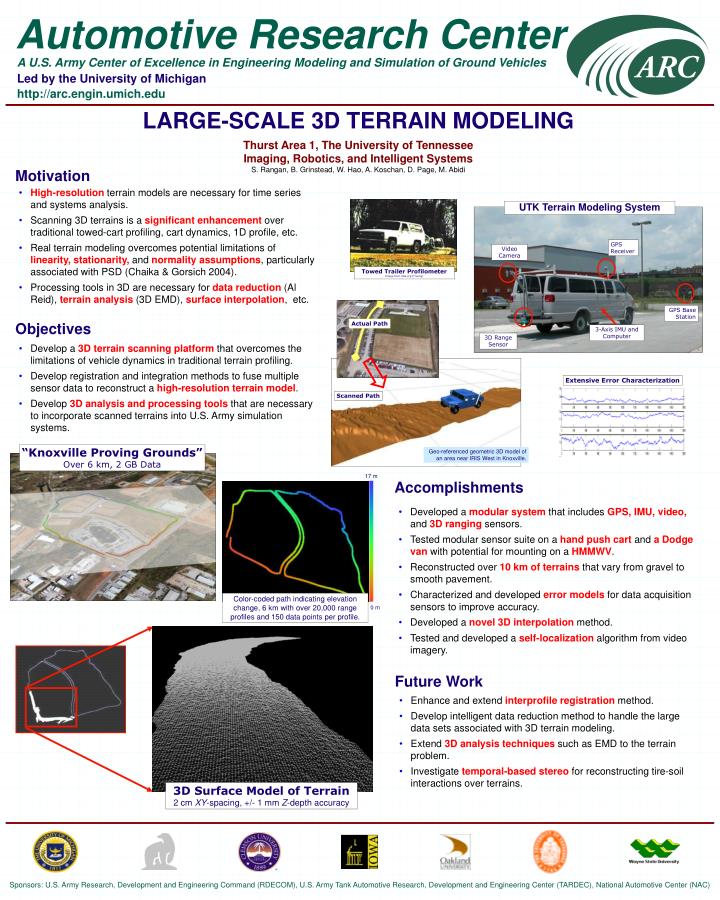
LARGE-SCALE 3D TERRAIN MODELINGThurst Area 1, The University of TennesseeImaging, Robotics, and Intelligent SystemsS. Rangan, B. Grinstead, W. Hao, A. Koschan, D. Page, M. Abidi Motivation • High-resolution terrain models are necessary for time series and systems analysis. • Scanning 3D terrains is a significant enhancement over traditional towed-cart profiling, cart dynamics, 1D profile, etc. • Real terrain modeling overcomes potential limitations of linearity, stationarity, and normality assumptions, particularly associated with PSD (Chaika & Gorsich 2004). • Processing tools in 3D are necessary for data reduction (Al Reid), terrain analysis (3D EMD), surface interpolation, etc. UTK Terrain Modeling System GPS Receiver Video Camera Towed Trailer Profilometer Image from ndia.org (Truong) GPS Base Station Objectives Actual Path 3-Axis IMU and Computer 3D Range Sensor • Develop a 3D terrain scanning platform that overcomes the limitations of vehicle dynamics in traditional terrain profiling. • Develop registration and integration methods to fuse multiple sensor data to reconstruct a high-resolution terrain model. • Develop 3D analysis and processing tools that are necessary to incorporate scanned terrains into U.S. Army simulation systems. Extensive Error Characterization Scanned Path “Knoxville Proving Grounds” Over 6 km, 2 GB Data Geo-referenced geometric 3D model of an area near IRIS West in Knoxville. 17 m Accomplishments • Developed a modular system that includes GPS, IMU, video, and 3D ranging sensors. • Tested modular sensor suite on a hand push cart and a Dodge van with potential for mounting on a HMMWV. • Reconstructed over 10 km of terrains that vary from gravel to smooth pavement. • Characterized and developed error models for data acquisition sensors to improve accuracy. • Developed a novel 3D interpolation method. • Tested and developed a self-localization algorithm from video imagery. Color-coded path indicating elevation change, 6 km with over 20,000 range profiles and 150 data points per profile. 0 m Future Work • Enhance and extend interprofile registration method. • Develop intelligent data reduction method to handle the large data sets associated with 3D terrain modeling. • Extend 3D analysis techniques such as EMD to the terrain problem. • Investigate temporal-based stereo for reconstructing tire-soil interactions over terrains. 3D Surface Model of Terrain 2 cm XY-spacing, +/- 1 mm Z-depth accuracy