Download
1 / 10
100 likes | 222 Views
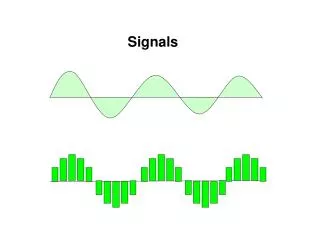
Input signals Signals need to be realisable, and excite the typical modes of the system. Ideally the signal should be persistent. Examples include Step function e.g. u=ones(1,100) PRBS - Pseudo random binary sequences (Pseudo noise)

E N D
Input signals Signals need to be realisable, and excite the typical modes of the system. Ideally the signal should be persistent. Examples include Step function e.g. u=ones(1,100) PRBS - Pseudo random binary sequences (Pseudo noise) ARMA - Autoregressive moving average process. The most common input (when the system can stand it) is to simply use a normally distributed random number i.e. ui=eior in Matlab speak u=randn(1,100) Sum of sinusoids It may be possible to overlay an existing input signal with one of the above signals so the system can be identified in-situ. CY3A2 System identification
Modelling the noise (Pseudo Linear Regression PLR) The ARMAX model includes a moving average model of noise, that is Which can be represented as CY3A2 System identification
but we do not usually have access to the noise terms. However one approach is to use the prediction errors as signal driving the noise process. One way of modifying the recursive least squares algorithm is to use the following Look at RLS again: Notice that the data matrix is now filled by prediction errors (5) from previous lags. CY3A2 System identification
Expected value The expected value of a variable is the average value that the variable would have if averaged over an extremely long period of time (N ∞). It represents the average amount one would expect to win on a bet in the long run if that same bet is taken many times. is the mean of x is the variance of x if and only if x and y are independent variables CY3A2 System identification
Recalling: LS estimate Assume that has zero mean, and uncorrelated with We would like to know if LS estimate is good and how? CY3A2 System identification
We show that LS estimate is unbiased, i.e. Proof: CY3A2 System identification
Now how accurate is LS estimate ? Covariance of LS estimate Assume CY3A2 System identification
Weighted least squares IF every data point is given a weighting, to indicate individual importance, then it’s called Weighted least squares. Minimising e.g. in RLS with forgetting Weighted least squares is given by CY3A2 System identification
If , it can be shown that the LS squares estimate (W=I) also has the minimum variance amongst all weighted LS estimates. Conclusion 1: 1. Under certain conditions, LS is unbiased, minimum variance parameter estimate, it is also a consistent parameter* estimator. *which means CY3A2 System identification
Conclusion 2 : 2. If certain conditions are violated, you can’t get good results; e.g. input signal needs to be exciting, so that the data matrix is full rank. or, if the noise term is correlated with the signal, the LS will be Biased, so we need to use a noise model, e.g., to include moving average noise term in data matrix. CY3A2 System identification