Download
1 / 1
10 likes | 277 Views
The Effect of Channel Estimation Error on the Performance of Finite-Depth Interleaved Convolutional Code. Jittra Jootar, James R. Zeidler, John G. Proakis. Motivation:

E N D
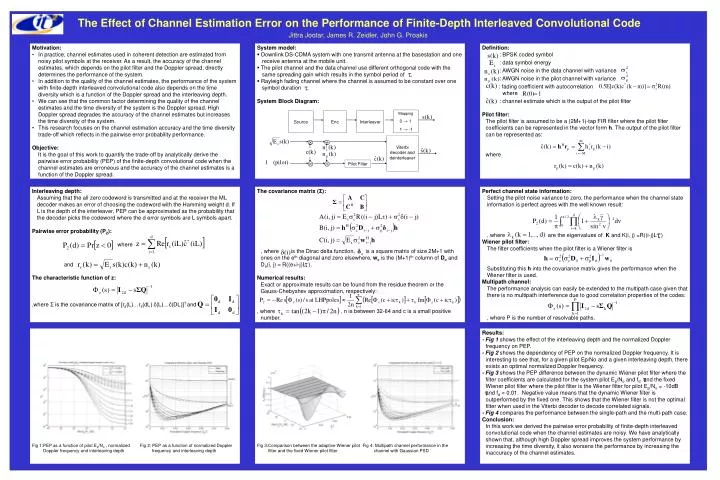
The Effect of Channel Estimation Error on the Performance of Finite-Depth Interleaved Convolutional Code Jittra Jootar, James R. Zeidler, John G. Proakis • Motivation: • In practice, channel estimates used in coherent detection are estimated from noisy pilot symbols at the receiver. As a result, the accuracy of the channel estimates, which depends on the pilot filter and the Doppler spread, directly determines the performance of the system. • In addition to the quality of the channel estimates, the performance of the system with finite-depth interleaved convolutional code also depends on the time diversity which is a function of the Doppler spread and the interleaving depth. • We can see that the common factor determining the quality of the channel estimates and the time diversity of the system is the Doppler spread. High Doppler spread degrades the accuracy of the channel estimates but increases the time diversity of the system. • This research focuses on the channel estimation accuracy and the time diversity trade-off which reflects in the pairwise error probability performance. • Objective: • It is the goal of this work to quantify the trade-off by analytically derive the pairwise error probability (PEP) of the finite-depth convolutional code when the channel estimates are erroneous and the accuracy of the channel estimates is a function of the Doppler spread. • System model: • Downlink DS-CDMA system with one transmit antenna at the basestation and one receive antenna at the mobile unit. • The pilot channel and the data channel use different orthogonal code with the same spreading gain which results in the symbol period of . • Rayleigh fading channel where the channel is assumed to be constant over one symbol duration . System Block Diagram: Definition: : BPSK coded symbol : data symbol energy : AWGN noise in the data channel with variance : AWGN noise in the pilot channel with variance : fading coefficient with autocorrelation where : channel estimate which is the output of the pilot filter Pilot filter: The pilot filter is assumed to be a (2M+1)-tap FIR filter where the pilot filter coefficients can be represented in the vector form h.The output of the pilot filter can be represented as: where Mapping 0 → 1 1 → -1 Source Enc Interleaver Viterbi decoder and deinterleaver Pilot Filter Interleaving depth: Assuming that the all zero codeword is transmitted and at the receiver the ML decoder makes an error of choosing the codeword with the Hamming weight d. If L is the depth of the interleaver, PEP can be approximated as the probability that the decoder picks the codeword where the d error symbols are L symbols apart. Pairwise error probability (P2): where and The characteristic function of z: ,where Σ is the covariance matrix of [rs(L)…rs(dL) ĉ(L)…ĉ(DL)]T and The covariance matrix (Σ): , where is the Dirac delta function, is a square matrix of size 2M+1 with ones on the eth diagonal and zero elsewhere, we is the (M+1)th column of De and De(i, j) = R((e+i-j)L ). Numerical results: Exact or approximate results can be found from the residue theorem or the Gauss-Chebyshev approximation, respectively: , where , n is between 32-64 and c is a small positive number. Perfect channel state information: Setting the pilot noise variance to zero, the performance when the channel state information is perfect agrees with the well known result: , where are the eigenvalues of K and K(i, j) =R((i-j)L ) Wiener pilot filter: The filter coefficients when the pilot filter is a Wiener filter is Substituting this h into the covariance matrix gives the performance when the Wiener filter is used. Multipath channel: The performance analysis can easily be extended to the multipath case given that there is no multipath interference due to good correlation properties of the codes: , where P is the number of resolvable paths. Fig 1:PEP as a function of pilot Ep/No , normalized Fig 2: PEP as a function of normalized Doppler Doppler frequency and interleaving depth frequency and interleaving depth Fig 3:Comparison between the adaptive Wiener pilot Fig 4: Multipath channel performance in the filter and the fixed Wiener pilot filter channel with Gaussian PSD Results: - Fig 1 shows the effect of the interleaving depth and the normalized Doppler frequency on PEP. - Fig 2 shows the dependency of PEP on the normalized Doppler frequency. It is interesting to see that, for a given pilot Ep/No and a given interleaving depth, there exists an optimal normalized Doppler frequency. - Fig 3 shows the PEP difference between the dynamic Wiener pilot filter where the filter coefficients are calculated for the system pilot Ep/No and fd and the fixed Wiener pilot filter where the pilot filter is the Wiener filter for pilot Ep/No = -10dB and fd = 0.01. Negative value means that the dynamic Wiener filter is outperformed by the fixed one. This shows that the Wiener filter is not the optimal filter when used in the Viterbi decoder to decode correlated signals. - Fig 4 compares the performance between the single-path and the multi-path case. Conclusion: In this work we derived the pairwise error probability of finite-depth interleaved convolutional code when the channel estimates are noisy. We have analytically shown that, although high Doppler spread improves the system performance by increasing the time diversity, it also worsens the performance by increasing the inaccuracy of the channel estimates.