Download
1 / 17
210 likes | 377 Views
Aerial Photography Camera System. Team Lead: Nathan Heermann Group Member: Teressa Specht Group Member: Larry Schweizer Sponsor/Mentor: Philip Heermann. Introduction. Description of Project Why is this project a good Senior Design project? Goal of Project Team Roles

E N D
Aerial Photography Camera System Team Lead: Nathan Heermann Group Member: Teressa Specht Group Member: Larry Schweizer Sponsor/Mentor: Philip Heermann
Introduction • Description of Project • Why is this project a good Senior Design project? • Goal of Project • Team Roles • Major Milestones • Deliverables • Biggest Challenges and Concerns • Work in Progress • Future Tasks
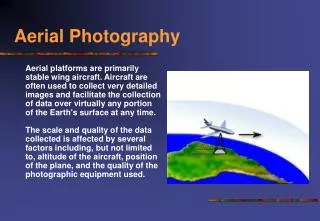
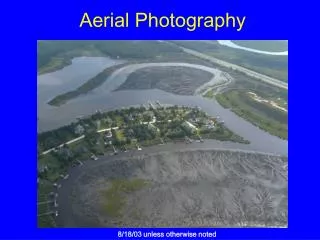
Description of Project • Our high level objective will be to develop a camera system that: • Can collect aerial photographs from a small manned aircraft. • Fill a void in the current market that is cost effective and functionally competitive. • Alleviate the incurred required upgrades that traditional systems need every few years.
Description of Project Why is this a good Senior Design Project? • Designing this camera system will: • Use classroom knowledge to solve a practical “real world” engineering problem • Gain knowledge in solving problems with physical limitations • Gain hardware and software experience • Integrate multiple components into a working system
Description of Project Goal of Project • Construct a high quality camera system using multiple commodity digital cameras. • Design to control the cameras and sustain their environment using electronics and software • Build the control system • Test the whole camera system to and collect aerial photographs from aircraft.
Roles • Team Lead: Nathan Heermann • Brainstorm and research solutions with the team • Handle communication and scheduling with mentor • Monitor project’s milestones • Develop proof-of-concept tests for circuitry
Roles • Group Member: Larry Schweizer • Brainstorm solutions with the team • Research, design, build, and test applicable solutions to use a single board computer to control the cameras and their settings • Research, design, build, and test a heating solution for the camera box
Roles • Group Member: Teressa Specht • Brainstorm solutions with the team • Research, design, build, and test applicable solutions for the power circuitry within the aircraft • Research, design, build, and test the control box that will be installed in the cabin of the aircraft
Roles • Sponsor/Mentor: Philip Heermann • Meet with students regularly to discuss progress • Give technical guidance through suggestions and advice • Review documentation for accuracy
Roles • Additional Support: Austin Heermann and Mike Douglas • Mechanic (Mike) will install all components and wiring onto the aircraft • Mechanic will ensure FAA safety requirements are met during inspection of the system after installation • Pilot (Austin) will be available for test flights • Austin will help install camera system components into the camera box
Major Milestones • Drive the cameras with the Arduino daughter card • Control the camera settings through a single board computer using a USB interface • Develop a power system for the cameras • Develop a control box inside of aircraft for cameras and power system • Software Development • Camera Controlling(shutter speed, aperture, etc) • GPS/IMU data packets(latitude & longitude, and roll, pitch & yaw.)
Deliverables • The system must be safe to fly on a manned aircraft and handle the aircraft environment • The camera system must be able to control up to 9 cameras simultaneously, firing at a frequency of 2Hz • Coordinate camera exposure settings • Camera triggering enable/control switch for pilot with indicator light (start/stop camera triggering)
Deliverables • Means to extract data without disassembly of camera pod • GPS/INU shall be synchronized to camera triggering to supply 3D position and orientation of cameras • Aircraft power is 24V, current requirements must be documented to assure sufficient aircraft power. • Supply power to 9 cameras • Documentation on the complete camera system
Biggest Challenges & Concerns • Power System Development • Each component is powered at a different voltage level • Communication Between Hardware Components • Establish how to make them “talk” and work together • Custom cabling • Software • Controlling Environmental Conditions • Vibration, Temperature (-40C) • FAA requirements
Future Tasks Tasks Planned for the next month: • Build prototype board for camera triggering • Design, order and build camera control box for inside the aircraft cabin • Get GPS/IMU to communicate with the Arduino board and the single board computer