Download
1 / 15
150 likes | 174 Views
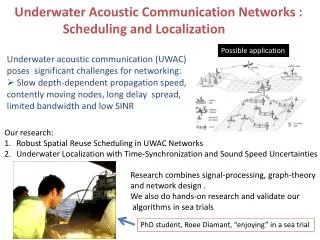
Fast Bayesian Acoustic Localization. Stan Birchfield Daniel Gillmor Quindi Corporation Palo Alto, California. Principle of Least Commitment. “Delay decisions as long as possible”. [Marr 1982; Russell & Norvig 1995; etc.]. Example:. Localization by Beamforming. mic 1 signal. delay.

E N D
Fast Bayesian Acoustic Localization Stan Birchfield Daniel Gillmor Quindi Corporation Palo Alto, California
Principle of Least Commitment “Delay decisions as long as possible” [Marr 1982; Russell & Norvig 1995; etc.] Example:
Localization by Beamforming mic 1 signal delay prefilter mic 2 signal delay prefilter q,f find peak sum energy mic 3 signal delay prefilter mic 4 signal delay prefilter [Duraiswami et al. 2001]
Localization by Pair-wise TDE mic 1 signal decision is made early prefilter find peak correlate mic 2 signal prefilter q,f intersect (may be no intersection) mic 3 signal prefilter find peak correlate mic 4 signal prefilter [Brandstein et al. 1995; Brandstein & Silverman 1997; Wang & Chu 1997]
Localization by Accumulated Correlation map to common coordinate system mic 1 signal prefilter correlate sampled locus mic 2 signal prefilter correlate final sampled locus … correlate q,f find peak sum correlate correlate temporal smoothing map to common coordinate system mic 3 signal prefilter correlate mic 4 signal prefilter decision is made after combining all the available evidence
Bayesian Localization: A Unifying View ’ Bayesian Beamform Correlation (similarity) (energy)
Comparison of V_C and V’_C ’ V V C C (sound generated at t ) (sound heard at t’ ) 0 0
Our Microphone Array Geometry microphone sampled hemisphere d=15cm (Can handle arbitrary geometries)
Results: Comparison of Algorithms Beamform Correlation Farfield [Birchfield & Gillmor 2001]
Noise Localization Model background noise source
Noise Localization Model -- Videos standard with noise localization model subtracted
Conclusion • Bayesian localization • follows principle of least commitment • similar to beamforming (weights energy differently) • Accumulated correlation • close approximation to Bayesian and beamforming; similar to TDE • just as accurate, but 1000 times faster (for compact arrays) • handles multiple sound sources, including subtracting constant background noise source