Download
1 / 6
70 likes | 194 Views
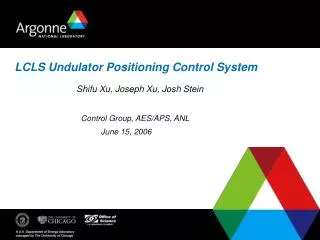
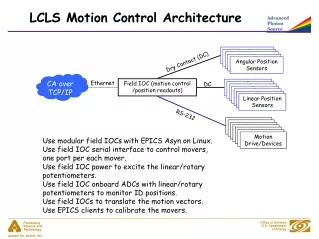
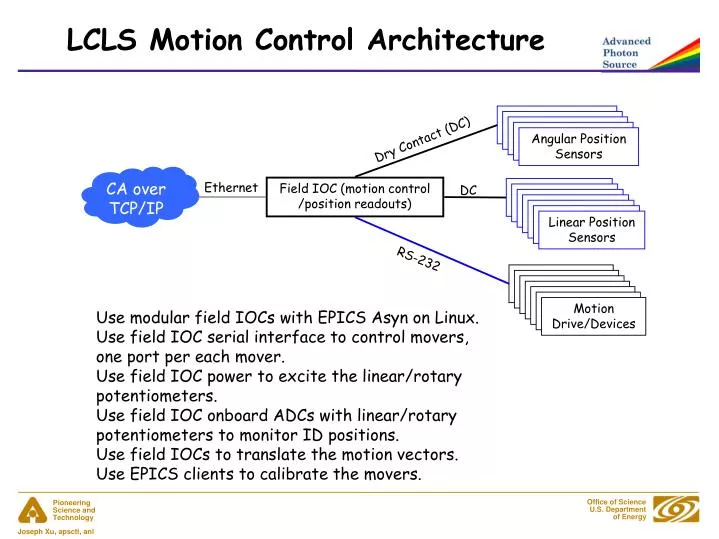
LCLS Motion Control Architecture. Angular Position Sensors. Angular Position Sensors. Angular Position Sensors. Angular Position Sensors. Angular Position Sensors. Dry Contact (DC). CA over TCP/IP. Ethernet. Field IOC (motion control /position readouts). Linear Position Sensors. DC.

E N D
LCLS Motion Control Architecture Angular Position Sensors Angular Position Sensors Angular Position Sensors Angular Position Sensors Angular Position Sensors Dry Contact (DC) CA over TCP/IP Ethernet Field IOC (motion control /position readouts) Linear Position Sensors DC Linear Position Sensors Linear Position Sensors Linear Position Sensors Linear Position Sensors Linear Position Sensors Linear Position Sensors RS-232 Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices • Use modular field IOCs with EPICS Asyn on Linux. • Use field IOC serial interface to control movers, one port per each mover. • Use field IOC power to excite the linear/rotary potentiometers. • Use field IOC onboard ADCs with linear/rotary potentiometers to monitor ID positions. • Use field IOCs to translate the motion vectors. • Use EPICS clients to calibrate the movers.
Field IOC Field IOC’s: Off-the-shelf Integrated Industrial Computer Systems (PC-104 based) with 16 ADC’s (16-bit) for position readouts and 8 RS-232 for motion controls. RT OS: Linux. EPICS 3.14.x w/ Asyn module. Prometheus w/16x16 bit ADCs, Diamond Systems Inc. Size: 5.5”x5.75”x1.7”. Power: 5W. Each ID/Cradle Assembly has one Field IOC
Motion Device Motion Drive/Devices: Servo Motors with RS-232 interfaces. SmartMotors from Animatics Corporations 2 for undulator segment translation. 5 for cradle assembly camshafts.
Linear Position Feedback Linear Position Sensors: Absolute position feedback with 2 microns repeatability and 0.2 micron resolution. Linear transducers (w/2-micron repeatability) from Novotechnik US, Inc. 2 for undulator segment translation and 8 for cradle assembly. With 16 bit readout, the resolution is 0.15 micron.
Rotary Position Feedback Rotary Position Sensors: Absolute position feedback with 0.1 degree repeatability and 0.01 degree resolution. Rotary transducers (w/0.004 degree repeatability) from Novotechnik US, Inc. 5 for cradle assembly camshafts. With 16 bit readout, the resolution is 0.005 degree.
Current Status • Asyn/EPICS/Linux based Field IOC SmartMotor drive development: Completed. • Motor drive unit test: Completed. • Cam Shaft motion control and position feedback system development: In progress. • Client (calibration) tools development: Pending. • Development environment setup: In progress. • Verification environment: Pending. • Network mgnt: Pending. Interface with SLAC IT. • Configuration mgnt: Pending. Interface with LCLS global ctls. • System and network verification: Pending. • Documentation: On going.