Download
1 / 47
470 likes | 584 Views
Geometric Representations & Collision Detection. Kris Hauser I400/B659: Intelligent Robotics Spring 2014. 3D models in robotics. Design Simulation Robot collision detection (i.e. prediction) Proximity calculation Map building Object recognition Grasp planning Etc.

E N D
Geometric Representations & Collision Detection Kris Hauser I400/B659: Intelligent Robotics Spring 2014
3D models in robotics • Design • Simulation • Robot collision detection (i.e. prediction) • Proximity calculation • Map building • Object recognition • Grasp planning • Etc..
Common Representations • Primitives • Raw data • Point clouds • Depth image • Polygon soup • Surfaces • Polygon mesh • Parametric curves • Subdivision surfaces • Implicit surface • Volumes • Voxels • Distance transforms • Quad/octree
Aspects to consider • How accurately does the geometry need to be represented? • What operations need to be performed on the geometry? (Recognition? Matching? Simulation? Collision detection? Visualization? Distance computation?) How quickly? How accurately? • Storage and transmission limitations? • How easily / reliably / accurately / quickly can the source data (e.g., raw sensor data, CAD models) be converted to the desired format?
Visualization • Primitives • Raw data • Point clouds • Depth image • Polygon soup • Surfaces • Polygon mesh • Parametric curves • Subdivision surfaces • Implicit surface • Volumes • Voxels • Distance transforms • Quad/octree Easy to convert to polygons Convert to polygons (somewhat expensive) Use specialized rasterization techniques
Easy Conversions • From primitives/surfaces to: • Polygon soups : discretization • Point clouds: sampling • Depth images: rasterization • From volumes to surfaces: • Simple: output a box for each occupied cell (coarse) • Marching cubes: walk along the volume until a surface is hit, output a piece of the surface in the volume (accurate)
Harder Conversions • From point clouds / soups to surfaces / volumes: a challenge • Fill cells that contain points (coarse) • Implicit function fitting • Silhouette carving • Lots of other methods… no “perfect” way to deal with missing data • From surfaces to volumes : • Fill cells that contain surface (coarse) • Euclidean distance transform: wavefront propagation from surface cells (closed surfaces, accurate)
Resolution issues • Accuracy, space, & computation complexity determined by resolution h • Suppose object size W • Point clouds, polygon meshes: O((W/h)2)space • Voxels: O((W/h)3) space • Downsampling • Mesh simplification
Geometric queries • Collision detection: • When A and B are at hypothetical poses TA and TB, would they collide? • Distance calculation • When A and B are at hypothetical poses TAand TB, how far are they apart? • Time-of-first contact • When A and B move along paths TA(t) and TB(t), at what time do they first collide?
Geometric primitives • Points, Rays, Lines, Segments, Triangles, Spheres, Ellipses, Boxes • Collision detection, distance detection fast operations (O(1)) • Ex: segment – sphere collision detection / distance calculation r
Managing large scenes • O(n2) pairs of objects – how to check collisions?
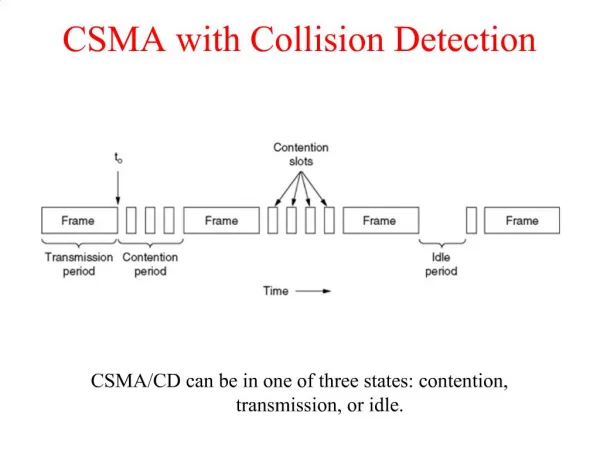
Collision Detection Methods • Many different methods • In particular: • Grid method: good for many simple moving objects of about the same size (e.g., many moving discs with similar radii) • Closest-feature tracking: good for moving polyhedral objects • Bounding Volume Hierarchy (BVH) method: good for few moving objects with complex and diverse geometry
Subdivide space into a regular grid cubic of square bins Index each object in a bin d Grid Method
d Grid Method Running time is proportional tonumber of moving objects Useful also to compute pairs of objects within some distance (vision,sound, …)
Closest-Feature Tracking(M. Lin and J. Canny. A Fast Algorithm for Incremental Distance Calculation. Proc. IEEE Int. Conf. on Robotics and Automation, 1991) The closest pair of features (vertex, edge, face) between two polyhedral objects are computed at the start configurations of the objects During motion, at each small increment of the motion, they are updated Efficiency derives from two observations: The pair of closest features changes relatively infrequently When it changes the new closest features will usually be on a boundary of the previous closest features
Closest-Feature Test for Vertex-Vertex Vertex Vertex
Application: Detecting Self-Collision in Humanoid Robots(J. Kuffner et al. Self-Collision and Prevention for Humanoid Robots. Proc. IEEE Int. Conf. on Robotics and Automation, 2002)
Bounding Volume Hierarchy Method BVH with spheres:S. Quinlan. Efficient Distance Computation Between Non-Convex Objects. Proc. IEEE Int. Conf. on Robotics and Automation, 1994. BVH with Oriented Bounding Boxes:S. Gottschalk, M. Lin, and D. Manocha. OBB-Tree: A Hierarchical Structure for Rapid Interference Detection. Proc. ACM SIGGRAPH '96, 1996. Combination of BVH and feature-tracking:S.A. Ehmann and M.C. Lin. Accurate and Fast Proximity Queries Between Polyhedra Using Convex Surface Decomposition. Proc. 2001 Eurographics, Vol. 20, No. 3, pp. 500-510, 2001. Adaptive bisection in dynamic collision checking:F. Schwarzer, M. Saha, J.C. Latombe. Adaptive Dynamic Collision Checking for Single and Multiple Articulated Robots in Complex Environments, manuscript, 2003.
Bounding Volume Hierarchy Method • Enclose objects into bounding volumes (spheres or boxes) • Check the bounding volumes first • Decompose an object into two
Bounding Volume Hierarchy Method • Enclose objects into bounding volumes (spheres or boxes) • Check the bounding volumes first • Decompose an object into two • Proceed hierarchically
Bounding Volume Hierarchy Method • Enclose objects into bounding volumes (spheres or boxes) • Check the bounding volumes first • Decompose an object into two • Proceed hierarchically
Bounding Volume Hierarchy Method • BVH is pre-computed for each object
A A C C B B E F E F D D G G Collision Detection Two objects described by their precomputed BVHs
pruning Collision Detection Search tree AA A A
A C B E F D G BB BC CB CC Collision Detection Search tree AA A A
A C B E F D G pruning Collision Detection Search tree AA BB BC CB CC
A C B E F D G FD FE GD GE If two leaves of the BVH’s overlap(here, G and D) check their content for collision Collision Detection Search tree AA BB BC CB CC G D
A C B AA E F D G BB BC CB CC AA BA CA Variant Search tree A A
Collision Detection • Pruning discards subsets of the two objects that are separated by the BVs • Each path is followed until pruning or until two leaves overlap • When two leaves overlap, their contents are tested for overlap
If there is no collision, all paths must eventually be followed down to pruning or a leaf node But if there is collision, it is desirable to detect it as quickly as possible Greedy best-first searchstrategy with f(N) = d/(rX+rY)[Expand the nodeXYwith largest relative overlap (most likely to contain a collision)] rY d rX Y X Search Strategy and Heuristics
Test(A,B) If A and B do not overlap, then return 1 If A and B are both leaves, then return 0 if their contents overlap and 1 otherwise Switch A and B if A is a leaf, or if B is bigger and not a leaf Set A1 and A2 to be A’s children If Test(A1,B) = 1 then return Test(A2,B) else return 0 Recursive (Depth-First) Collision Detection Algorithm
Performance • Several thousand collision checks per second for 2 three-dimensional objects each described by 500,000 triangles, on a 1-GHz PC
> M, prune M Distance Computation
Greedy-Distance(A,B,M) If min-dist(A,B) > M, then return M If A and B are both leaves, then return distance between their contents Switch A and B if A is a leaf, or if B is bigger and not a leaf Set A1 and A2 to be A’s children M min(max-dist(A1,B), max-dist(A2,B), M) d1Greedy-Distance(A1,B,M) d2Greedy-Distance(A2,B,M) Return Min(d1,d2) Greedy Distance Computation M (upper bound on distance) is initialized to infinity
Approx-Greedy-Distance(A,B,M,a) If (1+a)min-dist(A,B) > M, then return M If A and B are both leaves, then return distance between their contents Switch A and B if A is a leaf, or if B is bigger and not a leaf Set A1 and A2 to be A’s children M min(max-dist(A1,B), max-dist(A2,B), M) d1Approx-Greedy-Distance(A1,B,M,a) d2Approx-Greedy-Distance(A2,B,M,a) Return Min(d1,d2) Approximate Distance M (upper bound on distance) is initialized to infinity
Desirable Properties of BVs and BVHs BVs: • Tightness • Efficient testing • Invariance ? • BVH: • Separation • Balanced tree
Spheres • Invariant • Efficient to test • But tight?
Axis-Aligned Bounding Box (AABB) • Not invariant • Efficient to test • Not tight
Oriented Bounding Box (OBB) • Invariant • Less efficient to test • Tight
Comparison of BVs No type of BV is optimal for all situations
Desirable Properties of BVs and BVHs BVs: • Tightness • Efficient testing • Invariance • BVH: • Separation • Balanced tree ?
Desirable Properties of BVs and BVHs BVs: • Tightness • Efficient testing • Invariance • BVH: • Separation • Balanced tree
Construction of a BVH • Top-down construction • At each step, create the two children of a BV • Example: For OBB, split longest side at midpoint
N points ai = (xi, yi,zi)T, i = 1,…, N SVD of A = (a1a2 ... aN) A = UDVT where D = diag(s1,s2,s3) such that s1 s2 s3 0 U is a 3x3 rotation matrix that defines the principal axes of variance of the ai’s OBB’s directions The OBB is defined by max and min coordinates of the ai’s along these directions Possible improvements: use vertices of convex hull of the ai’s or dense uniform sampling of convex hull y X Y x Computation of an OBB[Gottschalk, Lin, and Manocha, 96] rotation described by matrix U