Download

1 / 15
150 likes | 306 Views
Robonaut 2. Robots espaciales Máster en robótica y automatización. Raúl Pérula Martínez <raul.perula@uc3m.es>. Introducción Antecedentes Robonaut 1 Robonaut 2 Futuro. Contenido. Introducción. Introducción.

E N D
Robonaut 2 Robots espaciales Máster en robótica y automatización Raúl Pérula Martínez <raul.perula@uc3m.es>
Introducción • Antecedentes • Robonaut 1 • Robonaut 2 • Futuro Contenido
Introducción Avance de la robótica y la miniaturización de los sistemas y componentes, se reduce la posibilidad de que sigan personas en la exploración espacial. Gran ventaja de los robots espaciales consiste en que no necesitan ningún tipo de materia orgánica como un ser humano. Otra ventaja es, proporcionar soporte y ayudar en trabajos repetitivos que pueda desempeñar un astronauta en una estación espacial. Su pérdida es siempre preferible a la de un astronauta.
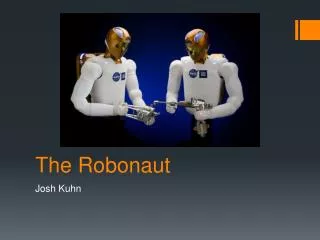
Introducción Las dos versiones del Robonaut 2 (R2A y R2B) han sido un trabajo conjunto entre la NASA y General Motors.
Robonaut 1 El Robonaut 1 (R1) fue el primer modelo desarrollado. Las dos versiones del Robonaut (R1A y R1B) tuvieron bastantes contribuyentes, entre ellos DARPA. Diseño del Robonaut, modularidad de su torso inferior. La segunda versión del Robonaut (R1B) se construyó en 2002. Esta versión es una versión portátil de R1.
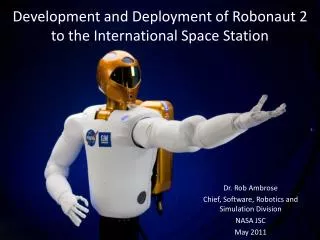
Robonaut 2 • El proyecto Robonaut 2 consiste en un proyecto para la construcción y desarrollo de un robot humanoide astronauta. • En un principio fue concebido para quedarse en tierra. • En Febrero del 2010, se reveló al público el proyecto Robonaut 2 (R2) y se valoró en 2,5 millones de dólares. • Objetivo: • Ayudar a los astronautas en trabajos de mantenimiento y reparación en el laboratorio Destiny en la Estación Espacial Internacional (ISS) • Vídeos: • http://youtu.be/EUBBlqSGqQM • http://youtu.be/glLX_sKTU2I?hd=1
Robonaut 2. Misiones • STS-133 • Idea principal del proyecto Robonaut: tener un robot controlado a distancia como los brazos robóticos de los transbordadores espaciales o el de la Estación Espacial Internacional (ISS). • Robonaut 2 fue lanzado al espacio, para contribuir en la misión STS-133 desde el 24 de Febrero de 2011. • Project M • Misión anunciada por el Centro Espacial Johnson. • No aprobada por falta de presupuesto. • Objetivo: aterrizar un robot R2 en la Luna.
Futuro • NASA y General Motors están desarrollando conjuntamente un guante robótico para los astronautas. • Lo han llamado Dispositivo de Asistencia de Comprensión Humana (theHumanGraspAssistdevice), para abreviar, K-Glove (K-guante) o Robo-Glove (Robo-Guante). • Objetivo: • Teleoperar brazos del Robonaut con un mínimo esfuerzo físico. • Las piernas del Robonaut están en desarrollo. Fecha prevista de envío: 2013.
Robonaut 2 Muchas gracias Preguntas Raúl Pérula Martínez <raul.perula@uc3m.es>