Download
1 / 6
60 likes | 65 Views
SAM: hardware options. Explained in the Gen II spec updated for clarity in May 05 see Section 10.3 see Figure 10. http://www.cpac.washington.edu/NeSSI/NeSSI_Gen_II_Spec_6_21_04.pdf. Figure 10. Stand-alone SAM Embedded SAM. Stand-alone SAM.

E N D
SAM: hardware options Explained in the Gen II spec • updated for clarity in May 05 • see Section 10.3 • see Figure 10 http://www.cpac.washington.edu/NeSSI/NeSSI_Gen_II_Spec_6_21_04.pdf
Figure 10 Stand-alone SAM Embedded SAM
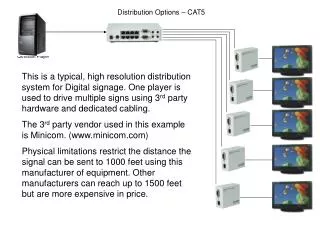
Stand-alone SAM • SAM has its own enclosure • The NeSSI-bus provides intrinsically safe, bi-directional communication with sensors and actuators • Heating for the substrate, enclosure or other devices is controlled by SAM • SAM communicates to the DCS and operations and maintenance domains via Ethernet.
Embedded SAM • The sensor or analyzer has its own controller and is directly connected to the controller, for example: • pH sensor connected with electrode cable • spectrometer with a sample cell on the substrate connected by fiber optic cable • GC with the sample delivered by NeSSI • SAM is embedded into the analyzer controller • The NeSSI-bus provides intrinsically safe, bi-directional communication with sensors and actuators • Heating for the substrate, enclosure or other devices is controlled by SAM • Analyzer controller communicates to the DCS and operations and maintenance domains via Ethernet.
A way forward to develop SAM? • Start off with embedded systems in GCs • hardware (computing power) already there • networking to DCS/maint. domains already there • control of sample systems already part of design • Opportunity to develop and test functionality in fastest time and at lowest cost • Starts out with a natural deployment mechanism • Follow on by deploying the software into a stand-alone package • what ready made devices are already available?