Download
1 / 24
240 likes | 248 Views
S PIN Search Algorithm. from “THE SPIN MODEL CHECKER” by G Holzmann Presented by Hong,Shin 9 th Nov 2007. Contents. Introduction Checking Safety Properties Checking Liveness Properties Adding Fairness Further work. Introduction 1/1.

E N D
SPIN Search Algorithm from “THE SPIN MODEL CHECKER” by G Holzmann Presented by Hong,Shin 9th Nov 2007 SPIN Search Algorithm
Contents • Introduction • Checking Safety Properties • Checking Liveness Properties • Adding Fairness • Further work SPIN Search Algorithm
Introduction 1/1 • A global reachability graph A={S, s0, L, T, F} is generated by PROMELA semantic engine. • Global reachability graph A captures the behavior of asynchronous execution of processes A1 … Ak. • Verify correctness properties of PROMELA models. • Checking Safety properties • Checking Liveness properties SPIN Search Algorithm
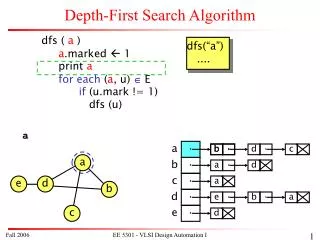
Checking Safety Properties 1/7 • Depth-first search algorithm systematically visitsevery reachable state. • By depth-first searching, safety properties such as deadlock state, progress assertions, and system invariant that should hold at some state s can be checked. • A stack and a state space are used in the algorithm. SPIN Search Algorithm
Checking Safety Properties 2/7 1 Stack D = {} ; Statespace V = {} 2 Start() { 3 Add_Statespace(V, A.s0) ; 4 Push_Stack(D, A.s0) ; 5 Search() ; 6 } 7 Search() { 8 s = Top_Stack(D) ; 9 foreach (s,l,s’) 2 A.T 10 if In_Statespace(V, s’) == false { 11 Add_Statespace(V, s’) 12 Push_Stack(D, s’) 13 Search() 14 } 15 Pop_Stack(D) 16 } Basic Depth-First Search Algorithm SPIN Search Algorithm
Checking Safety Properties 3/7 1 Stack D = {} ; Statespace V = {} 2 Start() { 3 Add_Statespace(V, A.s0) ; 4 Push_Stack(D, A.s0) ; 5 Search() ; 6 } 7 Search() { 8 s = Top_Stack(D) ; 9 if (!Safety(s)) Print_Stack(D) ; 10 foreach (s,l,s’) 2 A.T 11 if In_Statespace(V, s’) == false { 12 Add_Statespace(V, s’) ; 13 Push_Stack(D, s’) ; 14 Search() ; 15 } 16 Pop_Stack(D) ; 17 } Extended Algorithm for Checking Safety Properties SPIN Search Algorithm
Checking Safety Properties 4/7 • We can adopt the depth-first search algorithms easily into depth-limited search to guarantees coverage up to a given depth bound. S0 S1 Depth-limit is 2 S2 e • Store the depth value together with each state in • statespace V. SPIN Search Algorithm
Checking Safety Properties 5/7 1 Stack D = {} ; Statespace V = {} 2 Start() { 3 Add_Statespace(V, A.s0) ; 4 Push_Stack(D, A.s0) ; 5 Search() ;} 6 Search() { 7 if (Depth >= BOUND) return ; 8 Depth++ ; 9 s = Top_Stack(D) ; 10 if !Safety(s) Print_Stack(D) ; 11 foreach (s,l,s’) 2 A.T 12 if In_Statespace(V, s’, Depth) == false { 13 Add_Statespace(V, s’, Depth) 14 Push_Stack(D, s’) 15 Search() } 17 Pop_Stack(D) ; 18 Depth-- ; 19 } Depth-Limited Search Depth for each state visiting is store in state space if pan.c is compiled with DREACH option. SPIN Search Algorithm
Checking Safety Properties 6/7 1 Stack D = {} ; 2 Start() { 3 Push_Stack(D, A.s0,0) ; 4 Search() ; 5 } 6 Search() { 7 s = Top_Stack(D) ; 8 if (!Safety(s)) { 9 Print_Stack(D) ; 10 if (iterative) BOUND = DEPTH ; 11 } 12 foreach (s,l,s’) 2 A.T 13 if (In_Stack(D, s’) == false) { 14 Push_Stack(D, s’) ; 15 Search() ; 16 } 17 Pop_Stack(D); 18 } Stateless Search SPIN Search Algorithm
Checking Safety Properties 7/7 1 Queue D = {} ; Statespace V={} ; 2 Start() { 3 Add_Statespace(V, A.s0) ; 4 Push_Stack(D, A.s0) ; 5 Search() ; 6 } 7 Search() { 8 while (Empty_Queue(D) == false) { 9 s = Del_Queue(D) ; 10 foreach (s,1,s') 2 A.T { 11 if (In_Statespace(V, s') == false) { 12 Add_Statespace(V, s') ; 13 Add_Queue(D, s') ; 14 } 15 } 16 } 17 } Breath-First Search Algorithm • Pros • - Guarantee the shortest possible error • Cons • - Additional work is necessary for • error trace generation • - Hard to extend beyond safety • properties SPIN Search Algorithm
Checking Liveness Properties 1/5 • We can only have an infinite run in a finite system if the run is cyclic. • We are particularly interested in case where the set of states that are reached infinitely often contains one or more accepting states since these runs correspond to ! accepting run. • An accepting cycle in the global reachability graph exists if and only if • At least one accepting state is reachable from initial state. • At least one of those accepting state is reachable from itself. Use nested depth-first search algorithm for liveness properties checking. c.f. In synchronous product of automaton A = A1 A2 … A.F is the set of pairs (s1, s2) ∈ A.S where s1 ∈ A1.F or s2 ∈ A2.F SPIN Search Algorithm
Checking Liveness Properties 2/5 • Depth-first search determines that an accepting state has been reached, and all successors of that state have also been explored, it starts a nested search to see if the state is reachable from itself. Nested search in post-order • Store a copy of the accepting state in a global, called seed. • Store pairs of a state and a boolean variable toggle for stack and state space elements. SPIN Search Algorithm
Checking Liveness Properties 3/5 • Stack D = {} ; • Statespace V = {} ; • State seed = nil ; • Boolean toggle = false ; • Start() { 6 Add_Statespace(V, A.s0, toggle) ; 7 Push_Stack(D, A.s0, toggle) ; • Search() ; • } 10 Search() { 11 (s, toggle) = Top_Stack(D) ; 12 foreach (s, l, s’) 2 A.T { 13 if (toggle == true) { 14 if (s’ == seed || On_Stack(D, s’, false) { 15 PrintStack(D) ; 16 PopStack(D) ; 17 return ; } 18 } // end of if (toggle == true) SPIN Search Algorithm
Checking Liveness Properties 4/5 19 if (In_Statespace(V, s’, toggle) == false) { 20 Add_Statespace(V, s’, toggle) ; 21 Push_Stack(D, s’, toggle) ; 22 Search() ; 23 } 24 } // end of foreach 25 if (s 2 A.F && toggle == false) { 26 seed = s ; 27 toggle = true ; 28 Push_Stack(D, s, toggle) ; 29 Search() ; 30 Pop_Stack() ; 31 seed = nil ; 32 toggle = false ; 33 } // end of if 34 Pop_Stack(D) ; 35 } // end of Search() ; SPIN Search Algorithm
Checking Liveness Properties 5/5 • In nested search, if a successor was visited with toggle value true then it does not explore that successor. - Nested searching is excuted in post-order - Za is seed accepting state - Ze is a successor with toggle value true - Zn is an accepting state from which Ze was reachable. Zn Ze Za SPIN Search Algorithm
Adding Fairness1/8 • What will be the result from SPIN ? bit a = 0 ; active proctype A() { do :: a = 0 ; od ; } active proctype B() { do :: a = 1 ; od ; } never { accept_init: T0_init: if :: (!a) -> goto T0_init ; fi ; } -bash-3.1$ ./a.out -a warning: for p.o. reduction to be valid the never claim must be stutter-invariant (never claims generated from LTL formulae are stutter-invariant) pan: acceptance cycle (at depth 0) pan: wrote fairness.pml.trail (Spin Version 4.2.7 -- 23 June 2006) : : -bash-3.1$ spin -t -p fairness.pml Starting A with pid 0 Starting B with pid 1 Starting :never: with pid 2 <<<<<START OF CYCLE>>>>> Never claim moves to line 23 [(!(a))] 2: proc 0 (A) line 7 "fairness.pml" (state 1) [a = 0] spin: trail ends after 2 steps SPIN Search Algorithm
Adding Fairness 2/8 Strong Fairness An !-run ¾ satisfies the strong fairness requirement if it contains infinitely many transitions from every component automaton that is enabled infinitely often in ¾. Weak Fairness An !-run ¾ satisfies the weak fairness requirement if it contains infinitely many transitions from every component automaton that is enabled infinitely long in ¾. * Component automaton Ai is said to be enabled at state s of global automaton A if s has at least one valid outgoing transition from Ai. SPIN Search Algorithm
Adding Fairness 3/8 • Chouseka’s flag construction method • SPIN only checks weak fairness of components. • For a global reachability graph A which is product of k component automaton A1, A2, … Ak. (1)Create k+2 copies(0 to k+1) of the global reachability graph. (2)Preserve the acceptance labels only in the 0-th copy and remove the accepting labels from all states in the remaining copies. (3)Change the destination states for all outgoing transitions of accepting states in 0-th copy to point to the same states in the 1-st copy. (4)In the i-th copy(1 · i · k), change the destination of each transition that was contributed by component automaton Ai to the same state in the (i+1)-th copy. (5)For k+1-th copy, change all transitions such that their destination state is now in the 0-th copy. (6) Add null transition from every state s in i-th copy (1 · i · k) to the same state in the (i+1)-th copy whenever automaton component i has no enabled transitions in s. SPIN Search Algorithm
Adding Fairness 4/8 _pid 2 _pid 1 _pid = k _pid = 1 _pid = 1..k _pid = 2 _pid = 1..k copy0 copy1 copy2 copy k+1 (k + 2) Times Unfolded State Space for Weak Fairness SPIN Search Algorithm
Adding Fairness 5/8 • These changes do not add or remove behavior but it should be clear that any accepting !–run in (k+2) times unfolded state space now necessarily includes transitions from all k component automata. • Nested depth-first search can be used to detect all fair accepting runs in the original graph. • This algorithm can enforce weak fairness. • In SPIN implementation, each state holds 2(k+2) additional bits to represent (k+2) copies of global reachability graph. SPIN Search Algorithm
Adding Fairness 6/8 bit a = 0 ; active proctype A() /* pid=1 */ { do :: (a == 0) -> accept: a = 1 ; od ; } active proctype B() /* pid=2 */ { do :: (a == 1) -> a = 0 ; od ; } S1 a=0 pid=2 pid=1 S2 a=1 SPIN Search Algorithm
Adding Fairness 7/8 copy 0 copy1 copy2 copy3 S01 S11 S21 S31 S12 S22 S32 S02 SPIN Search Algorithm
Adding Fairness 8/8 • add weak fairness (-f option of ‘pan’) bit a = 0 ; active proctype A() { do :: a = 0 ; od ; } active proctype B() { do :: a = 1 ; od ; } never { accept_init: T0_init: if :: (!a) -> goto T0_init ; fi ; } ./a.out -f -a warning: for p.o. reduction to be valid the never claim must be stutter-invariant (never claims generated from LTL formulae are stutter-invariant) (Spin Version 4.2.7 -- 23 June 2006) + Partial Order Reduction Full statespace search for: never claim + assertion violations + (if within scope of claim) acceptance cycles + (fairness enabled) invalid end states - (disabled by never claim) SPIN Search Algorithm
Further Works • Search Optimization (Ch. 9) • Partial Order Reduction, Bitstate Hashing, State Compressions, etc. SPIN Search Algorithm