Download
1 / 1
10 likes | 107 Views
Market-Based Coordination of Recharging Robots. Victor Marmol vmarmol@andrew.cmu.edu Advisor: M. Bernardine Dias, Ph.D. Mentor: Balajee Kannan , Ph.D. Cost Functions. Abstract. Pairwise cost functions calculate the cost between two tasts .

E N D
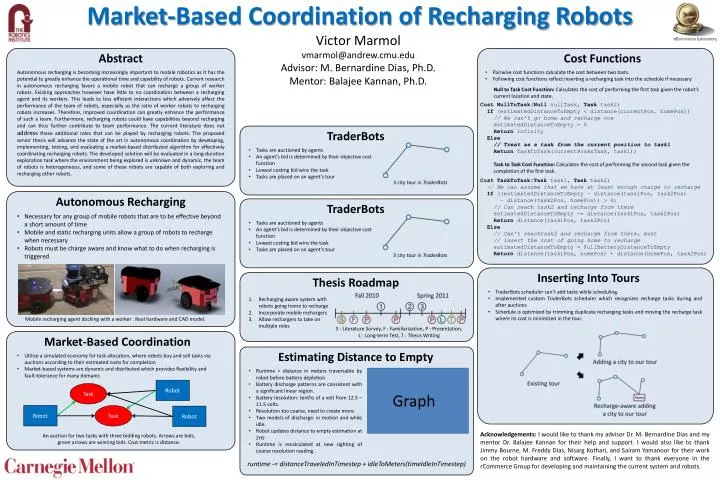
Market-Based Coordination of Recharging Robots Victor Marmol vmarmol@andrew.cmu.edu Advisor: M. BernardineDias, Ph.D. Mentor: BalajeeKannan, Ph.D. Cost Functions Abstract • Pairwise cost functions calculate the cost between two tasts. • Following cost functions reflect inserting a recharging task into the schedule if necessary Autonomous recharging is becoming increasingly important to mobile robotics as it has the potential to greatly enhance the operational time and capability of robots. Current research in autonomous recharging favors a mobile robot that can recharge a group of worker robots. Existing approaches however have little to no coordination between a recharging agent and its workers. This leads to less efficient interactions which adversely affect the performance of the team of robots, especially as the ratio of worker robots to recharging robots increases. Therefore, improved coordination can greatly enhance the performance of such a team. Furthermore, recharging robots could have capabilities beyond recharging and can thus further contribute to team performance. The current literature does not address these additional roles that can be played by recharging robots. The proposed senior thesis will advance the state of the art in autonomous coordination by developing, implementing, testing, and evaluating a market-based distributed algorithm for effectively coordinating recharging robots. The developed solution will be evaluated in a long-duration exploration task where the environment being explored is unknown and dynamic, the team of robots is heterogeneous, and some of these robots are capable of both exploring and recharging other robots. Null to Task Cost Function: Calculates the cost of performing the first task given the robot’s current location and state. CostNullToTask(NullnullTask, Task task2) If(estimatedDistanceToEmpty< distance(currentPos, homePos)) // We can’t go home and recharge now estimatedDistanceToEmpty = 0 Return Infinity Else // Treat as a task from the current position to task1 ReturnTaskToTask(currentPosAsTask, task1); TraderBots • Tasks are auctioned by agents • An agent’s bid is determined by their objective cost function • Lowest costing bid wins the task • Tasks are placed on an agent’s tour Task to Task Cost Function: Calculates the cost of performing the second task given the completion of the first task. CostTaskToTask(Tasktask1, Task task2) // We can assume that we have at least enough charge to recharge If((estimatedDistanceToEmpty – distance(task1Pos, task2Pos) – distance(task2Pos, homePos)) > 0) // Can reach task2 and recharge from there estimatedDistanceToEmpty -= distance(task1Pos, task2Pos) Return distance(task1Pos, task2Pos) Else // Can’t reachtask2 and recharge from there, must // insert the cost of going home to recharge estimatedDistanceToEmpty = FullBatteryDistanceToEmpty Returndistance(task1Pos, homePos) + distance(homePos, task2Pos) 3 city tour in TraderBots Autonomous Recharging TraderBots • Necessary for any group of mobile robots that are to be effective beyond a short amount of time • Mobile and static recharging units allow a group of robots to recharge when necessary • Robots must be charge aware and know what to do when recharging is triggered • Tasks are auctioned by agents • An agent’s bid is determined by their objective cost function • Lowest costing bid wins the task • Tasks are placed on an agent’s tour 3 city tour in TraderBots Inserting Into Tours Thesis Roadmap • TraderBots scheduler can’t add tasks while scheduling. • Implemented custom TraderBotsscheduler which recognizes recharge tasks during and after auctions • Schedule is optimized by trimming duplicate recharging tasks and moving the recharge task where its cost is minimized in the tour. Recharging aware system with robots going home to recharge Incorporate mobile rechargers Allow rechargers to take on multiple roles Mobile recharging agent docking with a worker . Real hardware and CAD model. S : Literature Survey, F : Familiarization, P : Presentation, L : Long-term Test, T : Thesis Writing Market-Based Coordination Estimating Distance to Empty • Utilize a simulated economy for task allocation, where robots buy and sell tasks via auctions according to their estimated costs for completion • Market-based systems are dynamic and distributed which provides flexibility and fault-tolerance for many domains • Runtime = distance in meters traversable by robot before battery depletion. • Battery discharge patterns are consistent with a significant linear region. • Battery resolution: tenths of a volt from 12.5 – 11.5 volts. • Resolution too coarse, need to create more. • Two models of discharge: in motion and while idle. • Robot updates distance to empty estimation at 2Hz • Runtime is recalculated at new sighting of coarse resolution reading. Robot Task Graph Robot Task Robot Acknowledgements: I would like to thank my advisor Dr. M. Bernardine Dias and my mentor Dr. BalajeeKannan for their help and support. I would also like to thank Jimmy Bourne, M. Freddy Dias, Nisarg Kothari, and SairamYamanoor for their work on the robot hardware and software. Finally, I want to thank everyone in the rCommerce Group for developing and maintaining the current system and robots. An auction for two tasks with three bidding robots. Arrows are bids, green arrows are winning bids. Cost metric is distance. runtime -= distanceTraveledInTimestep + idleToMeters(timeIdleInTimestep)