Download
1 / 51
1.42k likes | 5.17k Views
FORCE VECTORS, VECTOR OPERATIONS & ADDITION OF FORCES 2D & 3D. Today’s Objective : Resolve a 2-D vector into components. Add 2-D vectors using Cartesian vector notations. Represent a 3-D vector in a Cartesian coordinate system. Find the magnitude and coordinate angles of a 3-D vector.

E N D
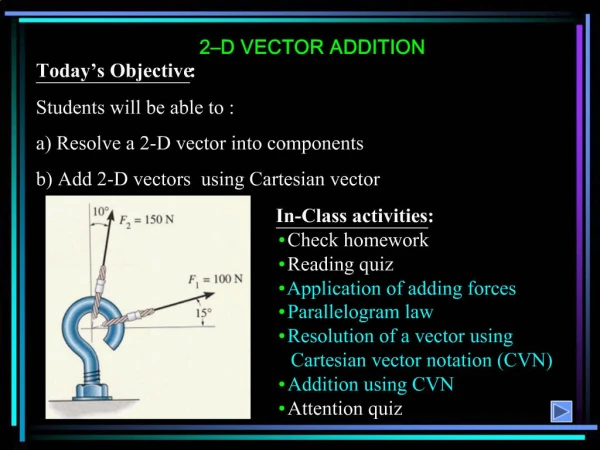
FORCE VECTORS, VECTOR OPERATIONS & ADDITION OF FORCES 2D & 3D Today’s Objective: Resolve a 2-D vector into components. Add 2-D vectors using Cartesian vector notations. Represent a 3-D vector in a Cartesian coordinate system. Find the magnitude and coordinate angles of a 3-D vector. Add vectors (forces) in 3-D space. 2 D 3 D
APPLICATION OF VECTOR ADDITION There are three concurrent forces acting on the hook due to the chains. We need to decide if the hook will fail (bend or break)? To do this, we need to know the resultant force acting on the hook. FR
SCALARS AND VECTORS (Section 2.1) ScalarsVectors Examples: Mass, Volume Force, Velocity Characteristics: It has a magnitude It has a magnitude (positive or negative) and direction Addition rule: Simple arithmetic Parallelogram law Special Notation: None Bold font, a line, an arrow or a “carrot” I write them with an arrow on top In these PowerPoint presentations, a vector quantity is represented like this(in bold, italics, and red).
Scalar Multiplication and Division VECTOR OPERATIONS(Section 2.2)
VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle method (always ‘tip to tail’): How do you subtract a vector? How can you add more than two concurrent vectors graphically ?
Analyzing a Force Triangle If we form a force triangle that represents the forces in a given problem, we can analyze the triangle using trigonometry. Force Triangle Right Triangles: If the triangle is a right triangle, we can use the following relationships: R B A
Analyzing a Force Triangle Oblique or Obtuse Triangles: If the triangle is NOT a right triangle, we can use the following relationships: • Law of cosines – Useful when: • You know 2 side and the angle between • You know all 3 sides and want to find the angles. a R B r b A • Law of sines – Useful when: • You know 2 sides and an opposite angle • You know 1 side and any two angles
Example: Finding Resultant Forces using a force triangle To steady a sign as it is being lowered, two cables are attached to the sign at A. Using trigonometry and knowing that the magnitude of P is 300N, determine: A) The required angle if the resultant R of the two forces applied at A is to be vertical. B) The corresponding value of R.
Example: Finding Resultant Forces using a force triangle Two structural members A and B are bolted to a bracket as shown. Knowing that both members are in compression and that the force is 30 kN in member A and 20 kN in member B, determine, using trigonometry, the magnitude and direction of the resultant of the forces applied to the bracket by members A and B. (Note: If a force is pushing, it is in compression. If a force is pulling, it is in tension.)
ADDITION OF A SYSTEM OF COPLANAR FORCES (Section 2.4) • We ‘resolve’ vectors into components using the x and y axis system. • Each component of the vector is shown as a magnitude and a direction. • The directions are based on the x and y axes. We use the “unit vectors” i and j to designate the x and y axes.
For example, F = Fx i + Fy j or F' = F'x i + ( F'y ) j The x and y axis are always perpendicular to each other. Together, they can be directed at any inclination.
ADDITION OF SEVERAL VECTORS • Step 1 is to resolve each force into its components. • Step 3 is to find the magnitude and angle of the resultant vector. • Step 2 is to add all the x-components together, followed by adding all the y components together. These two totals are the x and y components of the resultant vector.
An example of the process: Break the three vectors into components, then add them. FR = F1+ F2+ F3 = F1xi+ F1yj F2xi+ F2yj + F3xiF3yj = (F1x F2x+ F3x)i + (F1y + F2y F3y)j = (FRx)i+ (FRy)j
You can also represent a 2-D vector with a magnitude and angle.
Given: Three concurrent forces acting on a tent post. Find: The magnitude and angle of the resultant force. EXAMPLE Plan: a) Resolve the forces into their x-y components. b) Add the respective components to get the resultant vector. c) Find magnitude and angle from the resultant components.
EXAMPLE (continued) F1= {0i+300j } N F2= {– 450 cos (45°) i + 450 sin (45°) j } N = {– 318.2 i + 318.2 j } N F3= { (3/5) 600 i + (4/5) 600j } N = { 360 i+ 480 j } N
y FR x EXAMPLE (continued) Summing up all the i and j components respectively, we get, FR = { (0 – 318.2 + 360) i + (300 + 318.2 + 480)j} N = { 41.80 i + 1098 j } N Using magnitude and direction: FR = ((41.80)2 + (1098)2)1/2 = 1099 N = tan-1(1098/41.80) = 87.8°
EXAMPLE Determine the resultant of the three forces
Example – using calculators Using calculators to find resultants Solutions to the problems shown above can be produced quickly using calculators that can perform operations using complex numbers (or numbers in polar and rectangular form). Polar numbers - can be used to represent forces in terms of theirmagnitude and angle Rectangular numbers - can be used to represent forces in terms of unit vectors Example: Repeat the last example using the TI-85/86 or TI-89/92 calculator (Determine the resultant of the 3 forces on the hook below.)
Many structures and machines involve 3-Dimensional Space. 3DAPPLICATIONS In this case, the power pole has guy wires helping to keep it upright in high winds. How would you represent the forces in the cables using Cartesian vector form?
In the case of this radio tower, if you know the forces in the three cables, how would you determine the resultant force acting at D, the top of the tower? APPLICATIONS (continued)
For a vector A,with a magnitude of A, an unit vector is defined as uA = A/ A . The unit vectors in the Cartesian axis system are i, j, and k. They are unit vectors along the positive x, y, and z axes respectively. CARTESIAN UNIT VECTORS Characteristics of a unit vector : a) Its magnitude is 1. b) It is dimensionless (has no units). c) It points in the same direction as the original vector (A).
CARTESIAN VECTOR REPRESENTATION Consider a box with sides AX, AY, and AZ meters long. The vectorAcan be defined asA= (AXi + AYj + AZk) m The projection of vectorAin the x-y plane is A´. The magnitude of A´ is found by using the same approach as a 2-D vector: A’ = (AX2 + AY2)1/2 . The magnitude of the position vectorA can now be obtained as A = ((A´)2 + AZ2) ½ = (AX2 + AY2 + AZ2) ½
DIRECTION OF A CARTESIAN VECTOR These angles are measured between the vector and the positive X, Y and Z axes, respectively. Their range of values are from 0° to 180° The direction or orientation of vector A is defined by the angles ά, β, and γ. Using trigonometry, “direction cosines” are found using These angles are not independent. They must satisfy the following equation. cos ² + cos ² + cos ² = 1 This result can be derived from the definition of a coordinate direction angles and the unit vector. Recall, the formula for finding the unit vector of any position vector: or written another way, u A = cos i + cosj+ cosk .
Once individual vectors are written in Cartesian form, it is easy to add or subtract them. The process is essentially the same as when 2-D vectors are added. ADDITION OF CARTESIAN VECTORS (Section 2.6) For example, if A= AXi+ AYj+ AZk and B = BXi + BYj + BZk, then A + B = (AX + BX) i + (AY + BY) j + (AZ + BZ) k or A–B = (AX - BX)i + (AY - BY) j + (AZ - BZ) k
IMPORTANT NOTES Sometimes 3-D vector information is given as: a) Magnitude and the coordinate direction angles, or, b) Magnitude and projection angles. You should be able to use both these types of information to change the representation of the vector into the Cartesian form, i.e., F = {10 i– 20 j + 30 k} N .
Given: Two forces F1 and F2 are applied to a hook. Find: The resultant force in Cartesian vector form. Plan: EXAMPLE G Using geometry and trigonometry, write F1 and F2 in Cartesian vector form. Then add the two forces (by adding x, y and z components).
Solution : First, resolve force F1. Fx = 0 = 0 lb Fy = 500 (4/5) = 400 lb Fz = 500 (3/5) = 300 lb Now, write F1in Cartesian vector form (don’t forget the units!). F1= {0i+ 400 j+ 300 k}lb
Now resolve force F2. We are not given the direction angles. So we need to find the horizontal component in the xy plane. F2XY = 800 * cos(45°) = 565.69 lb F2x = 565.69 * cos(45°) = 489.90 lb F2y = 565.69 * sin(30°) = 282.84 lb F2z = -800 * sin(45°) = -565.69 lb
F1= {0i+ 400 j+ 300 k}lb F2 = {489.9i + 282.8j565.7 k}lb Now, R=F1+F2or R = {489.9 i + 682.8 j 265.7k} lb R
Example Find the magnitude and the coordinate direction angles of the resultant force.
POSITION VECTORS & FORCE VECTORS DOT PRODUCT Objectives: Students will be able to : Represent a position vector in Cartesian coordinate form, from given geometry. Represent a force vector directed along a line. determine an angle between two vectors, and, determine the projection of a vector along a specified line.
APPLICATIONS This awning is held up by three chains. What are the forces in the chains and how do we find their directions? Why would we want to know these things?
POSITION VECTOR A position vector is defined as a fixed vector that locates a point in space relative to another point. Consider two points, A and B, in 3-D space. Let their coordinates be (XA, YA, ZA) and (XB, YB, ZB ), respectively.
POSITION VECTOR The position vector directed from A to B, r AB , is defined as r AB= {( XB – XA )i + ( YB – YA ) j + ( ZB – ZA ) k }m Please note that B is the ending point and A is the starting point. ALWAYS subtract the starting point from the ending point.
FORCE VECTOR DIRECTED ALONG A LINE (Section 2.8) If a force is directed along a line, then we can represent the force vector in Cartesian coordinates by using a unit vector and the force’s magnitude. So we need to: a) Find the position vector, rAB, along two points on that line. b) Find the unit vector describing the line’s direction, uAB = (rAB/rAB). c) Multiply the unit vector by the magnitude of the force, F = F uAB.
EXAMPLE Given: The 420 N force along the cable AC. Find: The force FAC in the Cartesian vector form. Plan: 1. Find the position vector rACand the unit vector uAC. 2. Obtain the force vector as FAC = 420 N uAC .
EXAMPLE (continued) As per the figure, when relating A to C, we will have to go 2 m in the x-direction, 3 m in the y-direction, and -6 m in the z-direction. Hence, rAC= {2 i+ 3 j 6 k} m. (We can also find rAC by subtracting the coordinates of A from the coordinates of C.) rAC = (22 + 32 + 62)1/2 = 7 m Now uAC= rAC/rAC and FAC = 420 uAC N = 420 (rAC/rAC ) So FAC = 420{ (2 i+ 3 j 6k) / 7 } N = {120 i+ 180 j - 360 k} N
Example Find the magnitude and the coordinate direction angles of the resultant force. Plan: 1) Find the forces along CA and CB in the Cartesian vector form. 2) Add the two forces to get the resultant force, FR. 3) Determine the magnitude and the coordinate angles of FR.
DOT PRODUCT Students will be able to use the vector dot product to: a) determine an angle between two vectors, and, b) determine the projection of a vector along a specified line.
APPLICATIONS If the design for the cable placements required specific angles between the cables, how would you check this installation to make sure the angles were correct?
APPLICATIONS For the force F being applied to the wrench at Point A, what component of it actually helps turn the bolt (i.e., the force component acting perpendicular to the pipe)?
DEFINITION The dot product of vectors A and B is defined as A•B = A B cos . The angle is the smallest angle between the two vectors and is always in a range of 0 to 180º. Dot Product Characteristics: 1. The result of the dot product is a scalar (a positive or negative number). 2. The units of the dot product will be the product of the units of the A and Bvectors.
DOT PRODUCT DEFINITON (continued) Finding a dot product using Cartesian coordinates: By definition, i • j= j • i= i • k= k • i= j • k= k • j= 0 i • i= j • j= k • k= 1 so A • B = (Ax i + Ay j + Az k) • (Bx i + By j + Bz k) = Ax Bx + AyBy + AzBz
USING THE DOT PRODUCT TO DETERMINE THE ANGLE BETWEEN TWO VECTORS For the given two vectors in the Cartesian form, one can find the angle by a) Finding the dot product, A • B = (AxBx + AyBy + AzBz ), b) Finding the magnitudes (A & B) of the vectors A & B, and c) Using the definition of dot product and solving for , i.e., = cos-1 [(A • B)/(A B)], where 0º 180º .
Example: Finding angles using dot products Example: Consider the volleyball net shown below. Determine the angle formed by guy wires AB and AC.
Using the Dot Product to determine the projection of a vector along a line You can determine the components of a vector parallel and perpendicular to a line using the dot product. Steps: 1. Find the unit vector, uaa´ along line aa´ 2. Find the scalar projection of A along line aa´ by A|| = A • uaa = AxUx + AyUy + Az Uz
Using the dot product to determine the projection of a vector (continued) 3. If needed, the projection can be written as a vector, A|| , by using the unit vector uaa´and the magnitude found in step 2. A||= A||uaa´ 4. The scalar and vector forms of the perpendicular component can easily be obtained by A = (A 2 - A|| 2) ½ and A =A – A|| (rearranging the vector sum of A = A + A|| )
EXAMPLE Given: The force acting on the hook at point A. Find: The angle between the force vector and the line AO, and the magnitude of the projection of the force along the line AO. Plan: 1. Find rAO 2. Find the angle = cos-1{(F • rAO)/(F rAO)} 3. Find the projection via FAO = F • uAO(or F cos )
EXAMPLE (continued) rAO = {1 i + 2j 2 k} m rAO = (12 + 22 + 22)1/2 = 3 m F = { 6 i + 9 j + 3 k} kN F = (62 + 92 + 32)1/2 = 11.22 kN F • rAO= ( 6)(1) + (9)(2) + (3)(2) = 18 kN m = cos-1{(F • rAO)/(F rAO)} = cos-1 {18 / (11.22 * 3)} = 57.67°