Download
1 / 20
200 likes | 333 Views
Dr Rosalia Daví Dr Vaclav Vavryčuk. Moment tensor inversion using observations of unknown amplification. Institute of Geophysics, Academy of Sciences, Praha, Czech Republic e-mail: rosi.davi@ig.cas.cz .

E N D
Dr Rosalia Daví Dr Vaclav Vavryčuk Moment tensor inversion using observations of unknown amplification Institute of Geophysics, Academy of Sciences, Praha, Czech Republic e-mail: rosi.davi@ig.cas.cz
We propose a method for calibrating seismic networks in order to retrieve accurate moment tensors based on a joint inversion of large datasets of earthquakes for moment tensors and for amplifications of stations of the network. • The method is suitable for detecting technical problems at the stations (reverse polarities, incorrect orientation and amplification of sensors), for quantify local site effects and unify seismic networks. • Synthetic tests and numerical modeling (mapping the station distribution, the velocity model, the hypocenter locations of West-Bohemia). • Application in West-Bohemia (retrieval of highly accurate moment tensors).
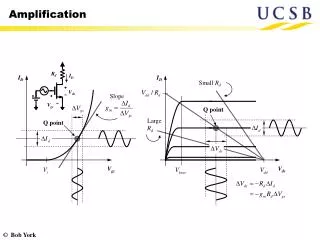
METHODOLOGY System of equations of the standard moment tensor inversion of amplitudes for one event where G is the Nx6 matrix of the Green’s function amplitudes is spatial derivatives of the Green’s tensor calculated for the ith station. u is the N-vector of the displacement amplitudes observed at N stations m is the 6-vector of moment tensor components
If we incorporate into the inversion one uncalibrated stationwith index i = N+1 and unknown station amplificationC(N+1) IT IS IMPORTANT TO HAVE HIGH VARIABILITY OF FOCAL MECHANISMS Combining the equations we obtain:
Numerical modeling • Generation of datasets of events with synthetic focal mechanisms. • Calculation of synthetic amplitudes. • Contamination of the amplitudes with random noise. • Multiplication of the noisy amplitudes by synthetic station amplifications. • Application of the procedure to calibrate the network and to retrieve the moment noise.
Partial network calibration 3 different datasets consisting of 10, 50 and 200 events with 2 station configurations defined as the sparse and dense configurations. The synthetic P-wave amplitudes were contaminated with uniformly distributed random noise of 3 levels: up to 10%, 25% and 50% of the noise-free amplitude.
The inversion for the station amplifications is performed repeatedly 100 times for different random noise. • The mean and standard deviations of the retrieved station amplifications are calculated. • The inversion code perform better with a high number of stations with known amplifications, a low level of noise and a high number of jointly analyzed events.
Sensitivity to the station location • The stations located in the proximityto the nodal lines display higher standard deviations compared to the other stations. • If the condition of a variety of focal mechanisms is satisfied, the inversion yields accurate results independently of the station locations.
Simple initial guess of station amplifications Simple initial guess Improved initial guess Complete network calibration Starting set of station amplifications Amplification of the 1st station is fixed The other amplifications are calculated All amplifications are normalized New iteration Calculation of the 1st station amplification The other amplifications are fixed Amplification of the 2nd station is fixed The other amplifications are calculated All amplifications are normalized Calculation of the 2nd station amplification The other amplifications are fixed • The complete network calibration can adjust station amplifications by including the local site effects at all stations. • The simplest way to calibrate the complete network (of N stations), is to perform the calibration in iterations. Repeating for all stations Repeating for all stations Calculation of the Nth station amplification The other amplifications are fixed Amplification of the Nth station is fixed The other amplifications are calculated All amplifications are normalized Normalization of the N retrieved amplifications New set of station amplifications N sets of N retrieved amplifications Difference in two successive sets of amplifications is small No Averaging of N amplifications for each station Yes Improved initial guess of station amplifications Final set of station amplifications
Convergence (a) Simple initial guess 1) We assume a simple initial guess when the starting values of all station amplifications equal 1. 2) We estimate the starting values using the improved initial guess. The iteration process with the improved initial guess (b) converges much faster. (b) Improved initial guess
Accuracy True station amplifications Retrieved station amplifications (a) • The retrieved amplifications are slightly biased from the true amplifications (noise in the data). • The lowest accuracy is achieved for station KAC (in the intersection of the nodal lines). (b) KAC Difference between the true and retrieved amplificationsin percent.
The RMS values are higher for the uncalibrated network. • The RMS values decrease for corrected moment tensors. Uncorrected moment tensors DC component Non-DC components RMS • The focal mechanisms (left-hand plots) are better clustered for uncalibrated moment tensors (artificial). • The uncorrected moment tensors display significant false negative CLVD and ISO components. • The corrected moment tensors display smaller CLVD and ISO components and form a cluster centered around the origin of coordinates. Corrected moment tensors DC component Non-DC components RMS
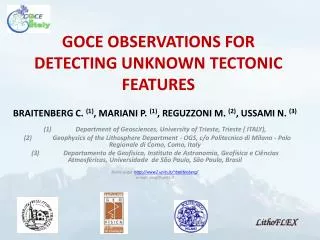
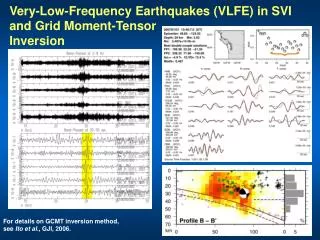
WEST BOHEMIA REGION • 22 short-period seismic stations (yellow triangles). Germany 200 micro-earthquakes: min 20 stations, high signal-to-noise ratio and highly accurate hypocenter locations. • Epicentres of the 2008 swarm (red circles) . • Depth of 7.6 to 10.8 km. (from Vavryčuk, 2011) Czech Republic
(a) Simple initial guess Convergence • Iterations with the improved initial guess converge faster. • Good convergence of the iterations and a reasonable accuracy of the station amplifications (the variability of the focal mechanisms is higher for observed data). (b) Improved initial guess
Accuracy • The accuracy of the amplification corrections was estimated using a jack-knife test (the iterative procedure was run 50 times on subsets of 100 randomly selected events). • The achieved accuracy of the station amplifications is ~ 4% for the majority of stations. • The only exceptions are stations KAC and HRED with accuracy of 6.0% and 5.6%.
Accuracy TRC • KAC station (unfavorable position). • HRED station (rather high noise level). • No station with a reversed polarity. • TRC station (incorrect calibration of the sensor, incorrect value of the gain factor or an anomalous medium response). • The scatter of the amplification corrections is high: the values range from 0.62 to 1.45. KAC HRED
The DC part of the moment tensors is rather stable. • The non-DC form a more compact cluster for corrected MT. • CLVD and ISO components are less compressive. Uncorrected moment tensors DC component Non-DC components RMS Corrected moment tensors DC component Non-DC components RMS • The average value of the CLVD changed from -16.3% to -9.7%. • The average value of the RMS is reduced from 0.19 to 0.11 .
Conclusions • We propose a method for calibrating seismic networks in order to retrieve accurate moment tensors based on a joint inversion of large datasets of earthquakes for moment tensors and for amplifications of stations of the network. • The inversion works better for dense networks (good focal sphere coverage, high variety of focal mechanisms and large datasets). • It detects: reverse polarities, incorrect orientation and amplification of sensors, anomalous local site effects at stations. • The tests (for accuracy and stability of the method) show that the moment tensors is retrieved with higher accuracy.
The inversion was applied to calibrate the WEBNET network (dataset of 200 micro-earthquakes that occurred in 2008). • The moment tensors retrieved using amplitudes of properly calibrated stations of the WEBNET network display lower RMS than the original moment tensors. • The focal mechanisms are not changed but the non-DC components of moment tensors changed significantly (one origins of spurious non-DC components might be linked to inaccurate amplifications). • The method is can be used for data gathered: (1) in laboratory experiments, (2) in boreholes or in mines (calibration and orientation are frequently unknown), or (3) in field experiments (networks are inhomogeneous).