Download
1 / 66
760 likes | 1.4k Views
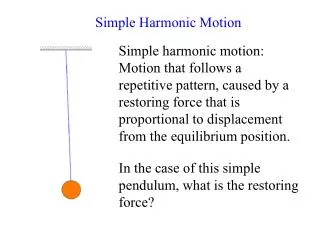
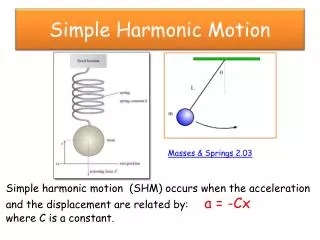
Oscillations and Simple Harmonic Motion :. Mechanics C . Oscillatory Motion is repetitive back and forth motion about an equilibrium position. Oscillatory Motion is periodic . Swinging motion and vibrations are forms of Oscillatory Motion .

E N D
Oscillations and Simple Harmonic Motion: Mechanics C
Oscillatory Motion is repetitive back and forth motion about an equilibrium position Oscillatory Motion is periodic. Swinging motion and vibrations are forms of Oscillatory Motion. Objects that undergo Oscillatory Motion are called Oscillators. Oscillatory Motion
The time to complete one full cycle of oscillation is a Period. The amount of oscillations per second is called frequency and is measured in Hertz. Simple Harmonic Motion
What is the oscillation period for the broadcast of a 100MHz FM radio station? Heinrich Hertz produced the first artificial radio waves back in 1887!
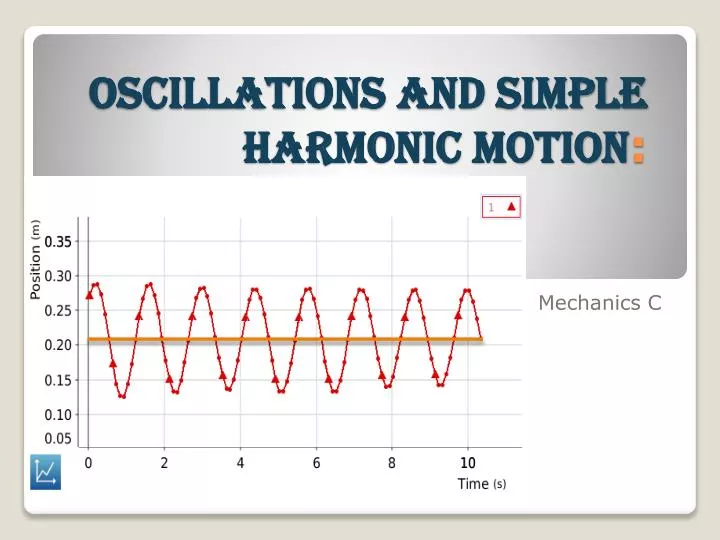
The most basic of all types of oscillation is depicted on the bottom sinusoidal graph. Motion that follows this pattern is called simple harmonic motion or SHM. Simple Harmonic Motion
An objects maximum displacement from its equilibrium position is called the Amplitude (A) of the motion. Simple Harmonic Motion
Everywhere the slope (first derivative) of the position graph is zero, the velocity graph crosses through zero. What shape will a velocity-time graph have for SHM?
x(t) to symbolize position as a function of time A=xmax=xmin When t=T, cos(2π)=cos(0) x(t)=A Mathematical Models of SHM
In this context we will call omega Angular Frequency What is the physical meaning of the product (Aω)? Mathematical Models of SHM The maximum speed of an oscillation!
Here is what we want to do: DERIVE AN EXPRESSION THAT DEFINES THE DISPLACEMENT FROM EQUILIBRIUM OF THE SPRING IN TERMS OF TIME. Recall: Hooke’s Law WHAT DOES THIS MEAN? THE SECOND DERIVATIVE OF A FUNCTION THAT IS ADDED TO A CONSTANT TIMES ITSELF IS EQUAL TO ZERO. What kind of function will ALWAYS do this?
An airtrack glider is attached to a spring, pulled 20cm to the right, and released at t=0s. It makes 15 oscillations in 10 seconds. What is the period of oscillation? Example:
An airtrack glider is attached to a spring, pulled 20cm to the right, and released at t=0s. It makes 15 oscillations in 10 seconds. What is the object’s maximum speed? Example:
An airtrack glider is attached to a spring, pulled 20cm to the right, and released at t=0s. It makes 15 oscillations in 10 seconds. What are the position and velocity at t=0.8s? Example:
A mass oscillating in SHM starts at x=A and has period T. At what time, as a fraction of T, does the object first pass through 0.5A? Example:
When collecting and modeling data of SHM your mathematical model had a value as shown below: What if your clock didn’t start at x=A or x=-A? This value represents our initial conditions. We call it the phase angle: Model of SHM
Uniform circular motion projected onto one dimension is simple harmonic motion. SHM and Circular Motion
Start with the x-component of position of the particle in UCM Notice it started at angle zero End with the same result as the spring in SHM! SHM and Circular Motion
We will not always start our clocks at one amplitude. Initial conditions:
Phi is called the phase of the oscillation Phi naught is called the phase constant or phase shift. This value specifies the initial conditions. Different values of the phase constant correspond to different starting points on the circle and thus to different initial conditions The Phase Constant:
An object on a spring oscillates with a period of 0.8s and an amplitude of 10cm. At t=0s, it is 5cm to the left of equilibrium and moving to the left. What are its position and direction of motion at t=2s? Initial conditions: From the period we get:
An object on a spring oscillates with a period of 0.8s and an amplitude of 10cm. At t=0s, it is 5cm to the left of equilibrium and moving to the left. What are its position and direction of motion at t=2s?
Total mechanical energy is conserved for our SHM example of a spring with constant k, mass m, and on a frictionless surface. The particle has all potential energy at x=A and x=–A, and the particle has purely kinetic energy at x=0. We have modeled SHM mathematically. Now comes the physics.
At turning points: At x=0: From conservation: Maximum speed as related to amplitude:
From energy considerations: From kinematics: Combine these:
a 500g block on a spring is pulled a distance of 20cm and released. The subsequent oscillations are measured to have a period of 0.8s. at what position or positions is the block’s speed 1.0m/s? The motion is SHM and energy is conserved.
Acceleration is at a maximum when the particle is at maximum and minimum displacement from x=0. Dynamics of SHM
Acceleration is proportional to the negative of the displacement. Dynamics of SHM
Acceleration is not constant: According to Newton’s 2nd Law: As we found with energy considerations: This is the equation of motion for a mass on a spring. It is of a general form called a second order differential equation. Dynamics of SHM
Unlike algebraic equations, their solutions are not numbers, but functions. In SHM we are only interested in one form so we can use our solution for many objects undergoing SHM. Solutions to these diff. eqns. are unique (there is only one). One common method of solving is guessing the solution that the equation should have… From evidence, we expect the solution: 2nd-Order Differential Equations:
Let’s put this possible solution into our equation and see if we guessed right! 2nd-Order Differential Equations: IT WORKS. Sinusoidal oscillation of SHM is a result of Newton’s laws!
Vertical springs oscillate differently than horizontal springs because there are 2 forces acting. The equilibrium position gets shifted downward
Hanging at rest: this is the equilibrium position of the system. What about vertical oscillations of a spring-mass system??
Now we let the system oscillate. At maximum: But: So: Everything that we have learned about horizontal oscillations is equally valid for vertical oscillations!
You need to show how to derive the Period of a Pendulum equationT = 2∏√l/g
The Pendulum Equation of motion for a pendulum
When θ is about 0.1rad or less, h and s are about the same. Small Angle Approximation:
Equation of motion for a pendulum The Pendulum
What length pendulum will have a period of exactly 1s? A Pendulum Clock
Notice that all objects that we look at are described the same mathematically. Any system with a linear restoring force will undergo simple harmonic motion around the equilibrium position. Conditions for SHM
Small Angle Approx. when there is mass in the entire pendulum, not just the bob. A Physical Pendulum
All real oscillators are damped oscillators. these are any that slow down and eventually stop. a model of drag force for slow objects: b is the damping constant (sort of like a coefficient of friction). Damped Oscillations
Solution to 2nd-order diff eq: Another 2nd-order diff eq. Damped Oscillations
A slowly changing line that provides a border to a rapid oscillation is called the envelope of the oscillations. Damped Oscillations
Not all oscillating objects are disturbed from rest then allowed to move undisturbed. Some objects may be subjected to a periodic external force. Driven Oscillations
All objects have a natural frequency at which they tend to vibrate when disturbed. Objects may be exposed to a periodic force with a particular driving frequency. If the driven frequency matches the natural frequency of an object, RESONANCE occurs DrivenOscillations
Best example of simple harmonic oscillator. T = 2m/k m Spring