Download
1 / 1
10 likes | 158 Views
Modelling the Dependence of Echo Strain in Temperature from Experiments in in-vitro Tissues Guoliang Ye, Penny Probert Smith, J. Alison Noble Dept. of Engineering Science, Parks Road, University of Oxford, Oxford, UK ye@robots.ox.ac.uk. Objective

E N D
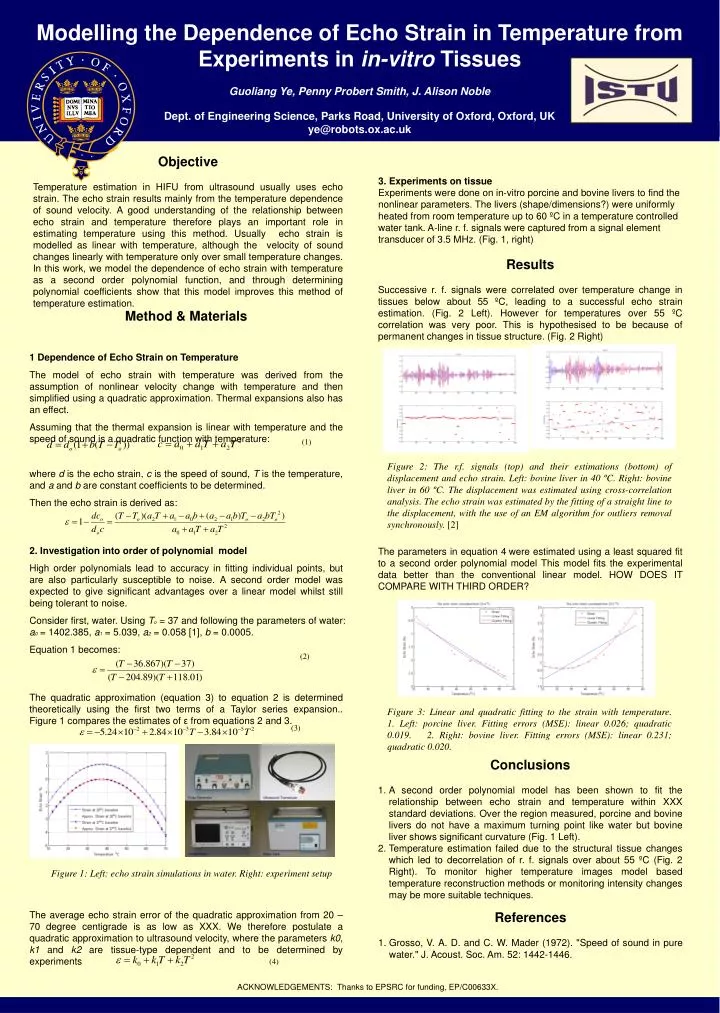
Modelling the Dependence of Echo Strain in Temperature from Experiments in in-vitro Tissues Guoliang Ye, Penny Probert Smith, J. Alison Noble Dept. of Engineering Science, Parks Road, University of Oxford, Oxford, UK ye@robots.ox.ac.uk Objective Temperature estimation in HIFU from ultrasound usually uses echo strain. The echo strain results mainly from the temperature dependence of sound velocity. A good understanding of the relationship between echo strain and temperature therefore plays an important role in estimating temperature using this method. Usually echo strain is modelled as linear with temperature, although the velocity of sound changes linearly with temperature only over small temperature changes. In this work, we model the dependence of echo strain with temperature as a second order polynomial function, and through determining polynomial coefficients show that this model improves this method of temperature estimation. 3. Experiments on tissue Experiments were done on in-vitro porcine and bovine livers to find the nonlinear parameters. The livers (shape/dimensions?) were uniformly heated from room temperature up to 60 ºC in a temperature controlled water tank. A-line r. f. signals were captured from a signal element transducer of 3.5 MHz. (Fig. 1, right) Results Successive r. f. signals were correlated over temperature change in tissues below about 55 ºC, leading to a successful echo strain estimation. (Fig. 2 Left). However for temperatures over 55 ºC correlation was very poor. This is hypothesised to be because of permanent changes in tissue structure. (Fig. 2 Right) The parameters in equation 4were estimated using a least squared fit to a second order polynomial model This model fits the experimental data better than the conventional linear model. HOW DOES IT COMPARE WITH THIRD ORDER? Method & Materials 1 Dependence of Echo Strain on Temperature The model of echo strain with temperature was derived from the assumption of nonlinear velocity change with temperature and then simplified using a quadratic approximation. Thermal expansions also has an effect. Assuming that the thermal expansion is linear with temperature and the speed of sound is a quadratic function with temperature: where d is the echo strain, c is the speed of sound, T is the temperature, and a and b are constant coefficients to be determined. Then the echo strain is derived as: 2. Investigation into order of polynomial model High order polynomials lead to accuracy in fitting individual points, but are also particularly susceptible to noise. A second order model was expected to give significant advantages over a linear model whilst still being tolerant to noise. Consider first, water. Using To= 37 and following the parameters of water: a0= 1402.385, a1 = 5.039, a2 = 0.058 [1],b = 0.0005. Equation 1 becomes: The quadratic approximation (equation 3) to equation 2 is determined theoretically using the first two terms of a Taylor series expansion.. Figure 1 compares the estimates of ε from equations 2 and 3. The average echo strain error of the quadratic approximation from 20 – 70 degree centigrade is as low as XXX. We therefore postulate a quadratic approximation to ultrasound velocity, where the parameters k0, k1 and k2 are tissue-type dependent and to be determined by experiments (1) Figure 2: The r.f. signals (top) and their estimations (bottom) of displacement and echo strain. Left: bovine liver in 40 ºC. Right: bovine liver in 60 ºC. The displacement was estimated using cross-correlation analysis. The echo strain was estimated by the fitting of a straight line to the displacement, with the use of an EM algorithm for outliers removal synchronously. [2] (2) Figure 3: Linear and quadratic fitting to the strain with temperature. 1. Left: porcine liver. Fitting errors (MSE): linear 0.026; quadratic 0.019. 2. Right: bovine liver. Fitting errors (MSE): linear 0.231; quadratic 0.020. (3) • Conclusions • A second order polynomial model has been shown to fit the relationship between echo strain and temperature within XXX standard deviations. Over the region measured, porcine and bovine livers do not have a maximum turning point like water but bovine liver shows significant curvature (Fig. 1 Left). • Temperature estimation failed due to the structural tissue changes which led to decorrelation of r. f. signals over about 55 ºC (Fig. 2 Right). To monitor higher temperature images model based temperature reconstruction methods or monitoring intensity changes may be more suitable techniques. Figure 1: Left: echo strain simulations in water. Right: experiment setup • References • Grosso, V. A. D. and C. W. Mader (1972). "Speed of sound in pure water." J. Acoust. Soc. Am. 52: 1442-1446. (4) ACKNOWLEDGEMENTS: Thanks to EPSRC for funding, EP/C00633X.