Download

1 / 23
230 likes | 240 Views
Domain Independent Approaches for Finding Diverse Plans. Biplav Srivastava Subbarao Kambhampati IBM India Research Lab Arizona State University sbiplav@in.ibm.com rao@asu.edu Tuan A. Nguyen Minh Binh Do University of Natural Sciences Palo Alto Research Center

E N D
Domain Independent Approaches for Finding Diverse Plans Biplav SrivastavaSubbarao Kambhampati IBM India Research Lab Arizona State University sbiplav@in.ibm.comrao@asu.edu Tuan A. Nguyen Minh Binh Do University of Natural Sciences Palo Alto Research Center natuan@fit.hcmuns.edu.vnminhdo@parc.com Alfonso Gerevini Ivan Serina University of Brescia University of Brescia gerevini@ing.unibs.itserina@ing.unibs.it IJCAI 2007, Hyderabad, India (6 Authors from 3 continents, 4 countries, 5 institutions) Domain Independent Approaches for Finding Diverse Plans
FPC FRE C={c1,c2,…c} X={x1,x2,…x} I={i1, i2,… i} Logical Composition Runtime Physical Composition S={S1,S2,…SK} W={W1,W2,…WL} Specifications RAW T={t1,t2,…t} RIW REW Motivation • Traditionally, Planning has been seen as a problem of finding a single plan for going from an initial to a goal state • Often, we need a set of inter-related plans instead of a single plan Domain Independent Approaches for Finding Diverse Plans
Motivation • Traditionally, Planning has been seen as a problem of finding a single plan for going from an initial to a goal state • Often, we need a set of inter-related plans instead of a single plan • Diverse plans • A set of web service compositions that can cover as much of the runtime failure circumstances as possible • Or a set of intrusion plans that are qualitatively different • Similar plans: plan stability (Fox et al ICAPS 06); a set of query plans so that partial results of time-out queries can be used • First diverse, then similar; etc … • We explore domain-independent approaches for finding diverse plans Domain Independent Approaches for Finding Diverse Plans
Finding Diverse plans • How do we formulate and solve this problem? • Naïve idea: Let the planner just continue to search for more plans • It is not enough for the planner to just produce multiple plans. We want the plans to have some guaranteed diversity • Domain-dependent approach • Have a meta-theory of the domain in terms of predefined attributes and their possible values covering roles, features and measures. Use these attributes to compare plans [Myers ICAPS 2006] • Issue: • Needs extensive domain modeling • Not affordable for many types of applications • We are interested in domain-independent approach. Need to: • Formalize notions of diversity (distance measures) • Need to develop (or adapt existing) planning algorithms to search for diverse plans • What bases for comparison are easier to enforce than others? • How scalable are the algorithms? Domain Independent Approaches for Finding Diverse Plans
Outline • Motivation • Problem Formulation (s) • Distance Measures • Different bases for comparison • Different bases for computation • Solution Approaches • Constraint-satisfaction based • Heuristic-search based • Results • Related Work • Conclusion • Future Work Domain Independent Approaches for Finding Diverse Plans
Problem Formulation • dDISTANTkSET • Given a distance measure d(.,.), and a parameter k, find k plans for solving the problem that have guaranteed minimum pair-wise distance d among them in terms of d(.,.) • Converse formulation for dCLOSEkSET • Variations on the formulations possible • Related work – Multiple solutions for CSP problems (See Hebrard 2005, 2006) Domain Independent Approaches for Finding Diverse Plans
Distance Measures • In what terms should we measure distances between two plans? • The actions that are used in the plan? • The behaviors exhibited by the plans? • The roles played by the actions in the plan? • Choice may depend on • The ultimate use of the plans • E.g. Should a plan P and a non-minimal variant of P be considered similar or different? • What is the source of plans and how much is accessible? • E.g. do we have access to domain theory or just action names? Domain Independent Approaches for Finding Diverse Plans
Basis for Comparing Plans • Actions in the plan • States in the behavior of the plan • Causal support structures in the plan Domain Independent Approaches for Finding Diverse Plans
Quantifying Distances • Set-difference • Neighborhood based • Prefix-based • Suffix-based • … Domain Independent Approaches for Finding Diverse Plans
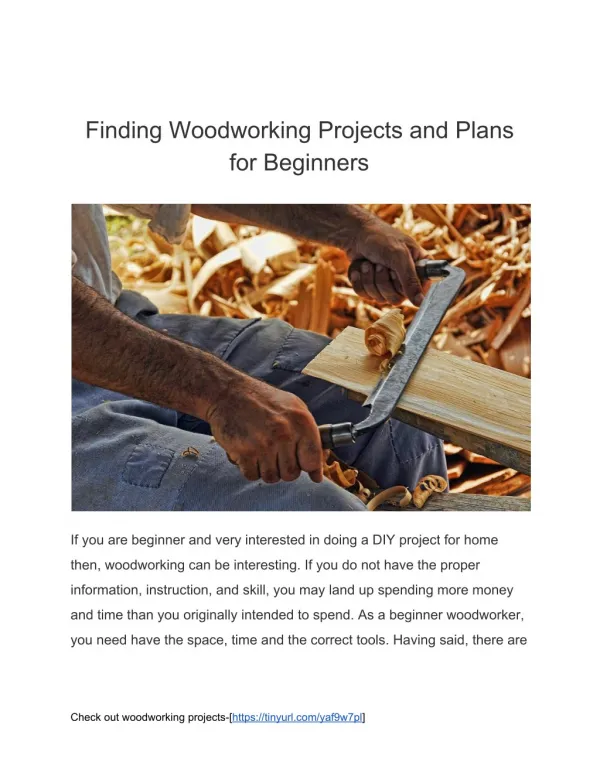
p1,p2,p3 g1,g2,g3 A1 A2 A3 <g1,g2,p3> <g1,p2,p3> <g1,g2,g3> <p1,p2,p3> Plan S1-2 A1 p1,p2,p3 g1,g2,g3 <g1,g2,g3> A2 A3 <p1,p2,p3> Plan S1-1 Goal State Initial State p1,p2,p3 g1,g2,g3 A1 A2’ A3’ <g1,g2,p3> <g1,p2,p3> <g1,g2,g3> <p1,p2,p3> Plan S1-3
p1,p2,p3 g1,g2,g3 A1 A2 A3 <g1,g2,p3> <g1,p2,p3> <g1,g2,g3> <p1,p2,p3> Plan S1-2 A1 p1,p2,p3 g1,g2,g3 <g1,g2,g3> A2 A3 <p1,p2,p3> Plan S1-1 Goal State Initial State Compute by Set-difference • Action-based comparison: S1-1, S1-2 are similar, both dissimilar to S1-3; with another basis for computation, all can be seen as different • State-based comparison: S1-1 different from S1-2 and S1-3; S1-2 and S1-3 are similar • Causal-link comparison: S1-1 and S1-2 are similar, both diverse from S1-3 p1,p2,p3 g1,g2,g3 A1 A2’ A3’ <g1,g2,p3> <g1,p2,p3> <g1,g2,g3> <p1,p2,p3> Plan S1-3
Solution Approaches • Possible approaches • [Parallel] Search simultaneously for k solutions which are bounded by given distance d • [Greedy] Search solutions one after another with each solution constraining subsequent search • Explored in • CSP-based GP-CSP classical planner • Relative ease of enforcing diversity with different bases for distance functions • Heuristic-based LPG metric-temporal planner • Scalability of proposed solutions Domain Independent Approaches for Finding Diverse Plans
GP-CSP Result: Solving time with different bases Average solving time (in seconds) to find a plan using greedy (first 3 rows) and by random (last row) approaches Solving for diversity guided by distance functions is more efficient than random search Domain Independent Approaches for Finding Diverse Plans
GP-CSP Result: Solution quality time with different bases Comparison of the diversity in the solution sets returned by the random and distance function-guided greedy approaches Solving for diversity guided by distance functions is likely to get better quality of results than random search Domain Independent Approaches for Finding Diverse Plans
GP-CSP Result: Using different distance bases (time) Solving for diversity guided by c or sis easier (givesmore results in the same time) than a Domain Independent Approaches for Finding Diverse Plans
GP-CSP Result: Using different distance bases (cross-validation on solution quality) Cell <row, column> = ’, ” indicates that over all combinations of (d,k) solved for distance d, the average value d”/d’ where d” and d’ are distance measured according to ” and ’ respectively. Example: <s ,a> = 0.485 means that over 462 combinations of (d,k) solvable for sfor each d, the average distance between k solutions measured by ais 0.485 * ds. The results indicate that when we enforce d for a, we will likely find even more diverse solution sets according to s (1.26* da) and c (1.98* da) Domain Independent Approaches for Finding Diverse Plans
Exploring with LPG • Details of changes to LPG in the paper • Looking for: • How large a problem can be solved easily • Large sets of diverse plans in complex domainscan be found relatively easily • Impact of • = 3 gives better results • Can randomization mechanisms in LPG givebetter result? • Distance measure needed to get diversity effectively Domain Independent Approaches for Finding Diverse Plans
Experiments with LPG LPG-d solves 109 comb. Avg. time = 162.8 secAvg. distance = 0.68Includes d<0.4,k=10; d=0.95,k=2 LPG-d solves 211 comb.Avg. time = 12.1 sec Avg. distance = 0.69 LPG-d solves 225 comb.Avg. time = 64.1 sec Avg. distance = 0.88 Domain Independent Approaches for Finding Diverse Plans
Related Work • The problem of returning diverse relevant results is important in Information Retrieval • Think “relevance” “solution ness” • The problem of finding “similar” plans has been investigated in Replanning and Plan Reuse. • But limited notions of distance measures • Myers 2006 gives a meta-theoretic basis for plan comparison • For CSPs, Hebrard et al 2005 have formulated the problem and proposed solutions • The worst-case complexity results can be borrowed for planning Domain Independent Approaches for Finding Diverse Plans
Conclusion • Contributions • Formalize notions of bases for plan distance measures • Proposed adaptation to existing representative, state-of-the-art, planning algorithms to search for diverse plans • Showed that using action-based distance results in plans that are likely to be also diverse with respect to behavior and causal structure • LPG can scale-up well to large problems with the proposed changes • The approach and results are representative of how other planners may be modified to find diverse plans Domain Independent Approaches for Finding Diverse Plans
Future Work • On the same thread • Solution approaches for more problems • Extensive experiments • More suitable distance measures • Generalized problem • Other action representations: Non-deterministic, HTN actions, … • Plans with different goals Domain Independent Approaches for Finding Diverse Plans
Appendix Domain Independent Approaches for Finding Diverse Plans
Purpose for Comparison and Characteristics of the Plan Distance Measure • Plans for visualization purpose • Minimal and non-minimal plans should be found similar. They achieve the goal, after all! • Plans for different goals should be seen different • Plans for execution purpose • Minimal and non-minimal plans should be found different. • Plans with similar execution trace should be seen similar even if they are for different goals Domain Independent Approaches for Finding Diverse Plans