Download
1 / 116
1.18k likes | 1.38k Views
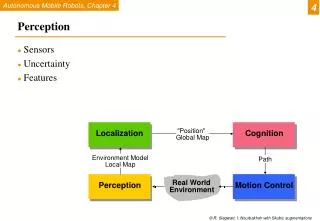
Amirkabir University of Technology Computer Engineering & Information Technology Department. Perception. دکتر سعید شیری قیداری & فصل 4 کتاب. Action عمل. اجزای روبات هوشمند. Perception ادراک. Cognition شناخت. Sensors حسگر. Actuators عملگر. External World محیط خارجی.

E N D
Amirkabir University of TechnologyComputer Engineering & Information Technology Department Perception دکتر سعید شیری قیداری & فصل 4 کتاب
Action عمل اجزای روبات هوشمند Perception ادراک Cognition شناخت Sensors حسگر Actuators عملگر External World محیط خارجی
اجزای روبات هوشمند • Perception • حس کردن، ساخت مدلی از دنیای اطراف • Cognition • رفتارها، انتخاب عمل، طرح ریزی، یادگیری • همکاری بین چند روبات، کار تیمی • پاسخ به محیط، یادگیری چند عاملی • Action • حرکت، ناوبری، پرهیز از موانع
دریافت دانش از محیط • یکی از مهمترین وظایف هر سیستم خودکار دریافت دانش از محیطش میباشد. • اینکار از طریق بکار گیری سنسورهای مختلف و استخراج اطلاعات مفید از داده های اندازه گیری شده میباشد. • رنج وسیعی از سنسورها در روباتهای خودکار مورد استفاده قرار میگیرد. در این فصل سنسورهائی مورد توجه قرار خواهند گرفت که برای دریافت اطلاعات از محیط بکار میروند.
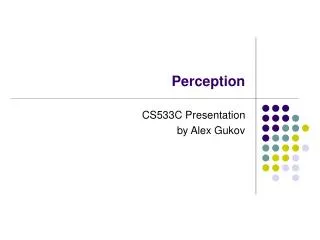
Gas Sensor Gyro Accelerometer Metal Detector Pendulum Resistive Tilt Sensors Piezo Bend Sensor Gieger-Muller Radiation Sensor Pyroelectric Detector UV Detector Resistive Bend Sensors CDS Cell Resistive Light Sensor Digital Infrared Ranging Pressure Switch Miniature Polaroid Sensor Limit Switch Touch Switch Mechanical Tilt Sensors IR Sensor w/lens IR Pin Diode Thyristor Magnetic Sensor Polaroid Sensor Board Hall Effect Magnetic Field Sensors Magnetic Reed Switch IR Reflection Sensor IR Amplifier Sensor IRDA Transceiver IR Modulator Receiver Radio Shack Remote Receiver Lite-On IR Remote Receiver Solar Cell Compass Compass Piezo Ultrasonic Transducers
برخی سنسور های متداول • Tactile sensors • contact switch, bumpers… • Infrared sensors • Reflective, proximity, distance sensors… • Ultrasonic Distance Sensor • Inertial Sensors (measure the second derivatives of position) • Accelerometer, Gyroscopes, • Orientation Sensors • Compass, Inclinometer • Laser range sensors • Vision, GPS, …
Sensor Fusion • در روباتهای سیار معمولا از تعداد زیادی سنسور استفاده میشود زیرا یک سنسور ممکن است کافی نباشد: • سنسورها در عمل دارای نویز زیادی هستند • دقت آنها محدود است • خراب میشوند ( قابل اعتماد نیستند) • قسمت محدودی از محیط را تحت پوشش قرار میدهند • قادر به توصیف دقیق محیط نیستند • سنسور مورد علاقه ممکن است گران باشد لذا ممکن است با ترکیب چند سنسور ارزان به هدف مورد نظر رسید
تکنیک های ترکیب اطاعات سنسور ها • داده ها از چندین منبع مختلف جمع آوری میشوند • از طریق چند سنسور مختلف اندازه گیری میشوند • از چند موقعیت مختلف اندازه گیری میشوند • در زمانهای مختلف اندازه گیری میشوند • با استفاده از یک روش ریاضی عدم قطعیت موجود در منابع داده درنظر گرفته میشود. • روشهای بیزین • شبکه های عصبی • فیلتر کالمن
دسته بندی سنسورها • داخلی: اطلاعاتی را از داخل روبات اندازه گیری میکنند. مثل: سرعت موتور، زاویه مفصل ها، ولتاژ باتری وغیره • خارجی: اطلاعاتی را از محیط روبات جمع آوری میکنند: اندازه گیری مسافت، شدت نور، دامنه صدا • Passive: سنسور انرژی را از محیط دریافت میکند مثل سنسور حرارتی، CCD ، و میکروفن • Active: انرژی را به محیط فرستاده وعکس العمل محیط در مقابل آنرا اندازه گیری میکند.
اندازه گیری کارائی سنسورها • Dynamic Range • عبارت است از دامنه حد بالا و پائین مقادیر ورودی به سنسور به نحویکه سنسور قادر به عملکرد عادی خود باشد. DR= Maximum Input/Minimum Input • معمولا بر حسب دسیبل بیان میشود.
اندازه گیری کارائی سنسورها • Range:حد بالای مقادیر ورودی به سنسور • Resolution: حداقل اختلاف بین دو مقداری که توسط سنسور قابل دریافت است • Linearity نحوه رفتار خروجی یک سنسور نسبت به تغییرات سیگنال ورودی را مشخص میکند یک رفتار خطی با رابطه زیر مشخص میشود. F(ax+by)= aF(x)+ bF(y)
اندازه گیری کارائی سنسورها • Bandwidth or Frequency برای اندازه گیری سرعت یک سنسور در آماده کردن دنباله ای از خروجی ها بکار میرود. بعبارت دیگر تعداد اندازه گیری های سنسور در ثانیه را به فرکانس تعبیر میکنند. • Sensitivity عبارت است از معیاری از میزان تغییرات جزئی در سیگنال ورودی که میتواند باعث تغییر در خروجی شود: Output change / Input change
اندازه گیری کارائی سنسورها • Cross Sensitivity عبارت است از حساسیت به پارامترهای محیطی که متعامد با سیگنال اصلی هستند. یک قطب نما میتواند در جهت یابی روبات بر اساس میدان مغناطیسی زمین بسیار مفید باشد. اما این وسیله علاوه بر میدان مغناطیسی زمین به مصالح ساختمانی فلزی نیز حساسیت دارد. در نتیجه استفاده از آن برای روبات که در محیط اتاق حرکت میکند چندان مفید نخواهد بود.
اندازه گیری کارائی سنسورها • error عبارت است از تفاضل مقدار اندازه گیری شده و مقدار واقعی error = m – v • Accuracy accuracy =1-error/v • Precision سنسوری دارای Precision بالاست که بتواند در اندازه گیری های متفاوت از یک کمیت واحدخروجی یکسانی تولید نماید. precision= range/σ
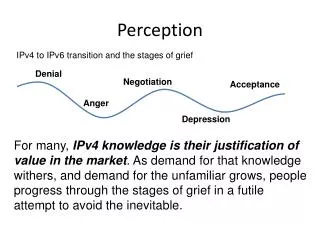
مشکلات کار در محیط واقعی • روبات متحرک باید وضعیت محیط اطرافش را درک کرده، آنالیز نموده و بنحو قابل استفاده ای بازگو نماید. اما اندازه گیری در محیط واقعی که همواره در معرض تغییر است کاری است مشکل و دارای خطا خواهد بود. • مثالی از تغییرات و خطاهای محیطی: • تغییرات شدت نور • جذب نور یا صدا توسط سطوح • انعکاس توسط سطوح • در نتیجه روبات همواره در معرض حساست تعامدی نسبت به موقعیت و دینامیک روبات و محیط خواهد بود. • مدل کردن خطاهای تصادفی کار سختی است • تعریف خطای سیستماتیک و تصادفی برای محیط های کنترل شده امکان پذیر است ولی برای روبات متحرک بسیار سخت است.
مدل کردن خطا • میتوان رفتار سنسورها را با استفاده از یک تابع احتمال مدل نمود. از آنجائیکه معمولا دانش کمی در مورد علت بوجود آمدن خطا وجود دارد در اغلب موارد توزیع احتمال خطا بصورت متقارن در نظر گرفته میشود. این فرض میتواند در مورد مثالهای زیر ناصحیح باشد: • بسته به شکل محیط و نوع اشیا قرار گرفته در آن سنسور اولتراسونیک فاصله را بیش از حد واقعی نشان میدهد. لذا برای حالتی که سیگنال برگستی صحیح بوده و حالتی که سگنل از محیط بدرستی برنگردد به دو مدل مختلف نیاز خواهیم داشت. • در مورد بینائی استریو کارولیشن صحیح برای همه پیکسلها اتفاق نمی افتد و نتایج ناصحیح بدست می آید.
مکان یابی Localization
مکان یابی روبات در محیط • یکی از قابلیت های اساسی برای یک روبات متحرک توانائی مکان یابی است. یعنی روبات بتواند موقعیت خود در محیط را تشخیص دهد. • روشهای مختلفی برای اینکار وجود دارد • Global Positioning System • Dead-reckoning localization • Triangulation Ranging • ....
انکدرهای چرخ و یا موتورها • در اغلب روباتهای متحرک چرخدار از موتورهائی استفاده میشود که جهت کنترل سرعت موتور مجهز به انکدر میباشند. از اینرو انکدر سنسوری است که براحتی در دسترس است و میتوان با استفاده از آن میزان چرخش موتور و یا چرخها را اندازه گرفت. در انکدر از دیسکهائی استفاده میشود که با نوارهای تیره و روشن تقسیم بندی شده اند. این نوارها با عبور دادن نور در مکان های روشن امکان اندازه گیری مقدار چرخش را میدهند.
A B A leads B Incremental Optical Encoders Encoder pulse and motor direction
Absolute Optical Encoders • Used when loss of reference is not possible. • Gray codes: only one bit changes at a time ( less uncertainty). • The information is transferred in parallel form (many wires are necessary). Binary Gray Code 000 001 010 011 100 101 110 111 000 001 011 010 110 111 101 100
Other Odometry Sensors • Resolver It has two stator windings positioned at 90 degrees. The output voltage is proportional to the sine or cosine function of the rotor's angle. The rotor is made up of a third winding, winding C • Potentiometer = varying resistance
Odometery &Dead Reckoning • برای یک روبات چرخدار میتوان مسافت طی شده توسط روبات را با اندازه گیری تعداد دورهائی که چرخ چرخیده است اندازه گرفت. • ادومتری عبارت است از تخمین فاصله و جهت از یک محل معلوم با استفاده از تعداد دورهائی که چرخهای روبات چرخیده اند. • ادومتری حالتی از Dead Reckoning است که در آن تخمین موقعیت براساس زمان، سرعت و جهت نسبت به یک نقطه معلوم اندازه گیری میشود. • Dead Reckoning برای سالیان متوالی توسط دریانوردانی چون کریستف کلمب استفاده شده است. این کار در روباتها با استفاده از انکدر ها و یا شتاب سنجها انجام میشود.
Dead-reckoning localization • این روش مبتنی بر استفاده از سنسورهای داخلی است و معمولا با استفاده از انکدرها و سایر سنسورها تغییرات موقعیت و جهت نسبت به فریم مرجع روبات اندازه گیری میشود. • معمولا فیدبکی از محیط دریافت نمیشود. لذا احتمال بروز خطا در این روش وجود دارد. • روشی ساده وسریع است. • معمولا در ترکیب با سایر روشها استفاده میشود.
مشکلات ادومتری • ادومتری برای تخمین موقعیت در فاصله های کوتاه و محاسبات نسبی مفید است اما با افزایش فاصله خطا و عدم قطعیت بدون محدودیت رشد خواهند نمود. • این عدم قطعیت ناشی از خطاهای سیستماتیک و غیر سیستماتیک است.
خطاهای ادومتری • خطاهای غیر سیستماتیک: • بندرت قابل اندازه گیری هستند از اینرو نمیتوان آنها را در مدل اعمال نمود. نظیر: سر خوردن چرخها، متفاوت بودن اصطکاک، برخورد با اشیا، و اختلاف سطح کف محیط • خطاهای سیستماتیک: • خطاهائی هستند که قابل اندازه گیری بوده و از طریق کالیبره کردن قابل جبران هستند و میتوان اثر آنها را در مدل اعمال کرد. نظیر: متفاوت بودن قطر چرخها که باعث حرکت دورانی روبات میشود، و یا عدم قطعیت در مورد پایه چرخها که باعث خطا در زاویه چرخش میشود.
β (x+∆x, y+∆y, β) α (x, y, α) Dead-Reckoning Accumulated error can be quite big for a period of time. (0,0) Dead-Reckoning
A robot’s path as obtained by its odometry, relative to a given map. تاثیر خطای ادومتری در مسیر تخمین زده شده
سنسور جهت • برای اندازه گیری جهت روبات میتوان از سنسور داخلی مثل ژایروسکوپ یا خارجی مثل قطب نما استفاده کرد. این سنسور مقدار چرخش روبات را اندازه گیری میکند. • در صورت داشتن اطلاعات سرعت میتوان با انتگرال گیری تخمینی از وقعیت را بدست آورد.
ژایرسکوپ • ژایرسکوپ سنسوری برای اندازه گیری جهت است. دارای المان چرخانی است که میتواند جهت چرخش خود را نسبت به محور مشخصی ثابت نگه دارد. از اینرو اندازه مطلقی برای جهت تولید میکند. • به دو صورت مکانیکی و اپتیکی ساخته میشوند.
ژایرسکوپ • اصول کار ژایرسکوپ مکانیکی بر مبنای خاصیت اینرسی یک روتور دوار سریع است: • اگر سعی کنید یک روتور سریع را در جهت محور عمودی آن تغییر جهت دهید نیروی زیادی به دست شما وارد خواهد آمد که مقدار آن به سرعت چرخش بستگی دارد. • برای استفاده از ژایرو در ناوبری محور چرخش آنرا در جهت مشخصی مثلا شمال-جنوب قرار میدهند.
ژایرسکوپ • اگر به محور چرخش ژایرو نیروئی وارد شود، ژایرو با نیروئی قائم به آن عکس العمل نشان خواهد داد. This mass resonates with sufficient velocity to produce a Coriolis force when the device is subjected to rotation. A capacitive sensing structure that modulates the Coriolis force is mounted orthogonal to the mass. The Coriolis force is then directly related to the rotational velocity, and internal demodulation converts the signal into an output voltage. In figure 1, the gyroscope is spinning on its axis.In figure 2, a force is applied to try to rotate the spin axis.In figure 3, the gyroscope is reacting to the input force along an axis perpendicular to the input force
Introduction to GPS • What is GPS • The Global Positioning System (GPS) is a worldwide radio-navigation system formed from a constellation of 24 satellites and their ground stations • GPS receivers use these satellites as reference points to calculate positions and time • Originally known as Navigation System with Timing And Ranging (NAVSTAR)
GPS Error Budget • Source Uncorrected Error Level Ionosphere 0-30 meters • Troposphere 0-30 meters • Measurement Noise 0-10 meters • Ephemeris Data 1-5 meters • Clock Drift 0-1.5 meters • Multipath 0-1 meter • Selective Availability 0-70 meters
سنسور های فاصله • اندازه گیری فاصله به روش Active rangingیکی از متداولترین روشها در روباتهای متحرک است: یک موج صوتی و یا نوری از طریق فرستنده ای که روی روبات نصب است به محیط ارسال میشود و گیرنده ای که در روی روبات قرار دارد منتظر بازگشت موج منعکس شده توسط اشیا و موانع موجود در محیط میشود. با اندازه گیری زمان پرواز رفت و برگشت موج میتوان فاصله تا اشیا و وموانع را محاسبه نمود. • اغلب ارزان هستند و اندازه گیری مستقیمی از فاصله را تولید میکنند. • برای تشخیص موانع بکار میروند. • برای تهیه نقشه فضای آزاد محیط بکار میروند. • رقیب جدی آنها vision است که ممکن است از جذابیت آنها بکاهد.
اندازه گیری فاصله به روش time of flight • دو سنسور بسیار متداول که بر مبنای خاصیت time-of-flightمورد استفاده قرار میگیرند عبارتند از: Sonar و Laser • مسافتی که یک موج صوتی و یا نوری ( الکترومغناطیسی) در محیط طی میکند از رابطه زیر بدست می آید: d =c⋅t where d = distance traveled (usually round-trip); c = speed of wave propagation; t = time of flight. • سرعت انتشار صوت در محیط 300m/s است در حالیکه سرعت نور 300000 Km/s یعنی یک میلیون بار سریعتر است. برای مثال نور 3 متر را در 10ns طی میکند از اینرو اندازه گیری زمان پرواز نور برای فواصل کوتاه کار بسیار مشکلی است.
عوامل موثر بر کیفیت اندازه گیری زمان پرواز موج • Uncertainties in determining the exact time of arrival of the reflected signal; • Inaccuracies in the time-of-flight measurement (particularly with laser range sensors); • The dispersal cone of the transmitted beam (mainly with ultrasonic range sensors); • Interaction with the target (e.g., surface absorption, specular reflections); • Variation of propagation speed; • The speed of the mobile robot and target (in the case of a dynamic target);
سنسور اولتراسونیک • سنسورهای اولتراسونیک بدلیل ارزانی و سادگی استفاده در روباتها برای اندازه گیری فاصله، پرهیز از موانع و ساخت نقشه محیط استفاده میشوند. • در این سنسور یک بسته صوتی با فرکانسی در حدود 40-180KHz توسط فرستنده ارسال میشود و سیگنالی که از محیط منعکس میشود اندازه گیری میشود. فاصله تا اشیا از طریق اندازه گیری زمان رفت و برگشت سیگنال محاسبه میشود.