Download
1 / 15
150 likes | 265 Views
An Efficient Mobile Robot Path Planning using Hierarchical Roadmap Representation In indoor Environment. Aamir Reyaz Khan 2012-50800 NSCL. Contents. Review of the paper Previous work and proposed related approaches . Proposed approach Hierarchical roadmap Hierarchical Path-planning

E N D
An Efficient Mobile Robot Path Planning using Hierarchical Roadmap Representation In indoor Environment Aamir Reyaz Khan 2012-50800 NSCL
Contents • Review of the paper • Previous work and proposed related approaches . • Proposed approach • Hierarchical roadmap • Hierarchical Path-planning • Implementation • Hierarchical Roadmap Construction • Path Planning using Hierarchical Roadmap • Results
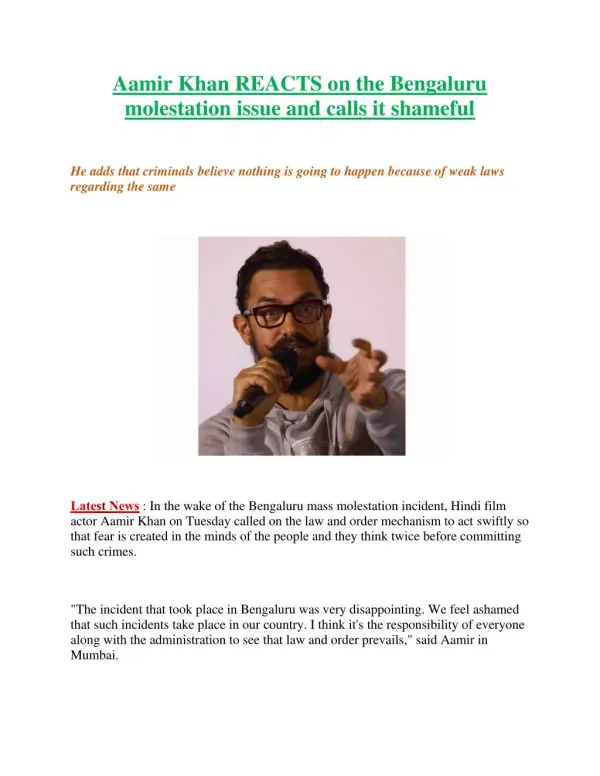
General Review of the Paper • The paper is about the Mobile Robot path-planning to solve the limitations of roadmap based mobile robot path planner in indoor environments. • The Author has proposed approach which incrementally constructs a hierarchical roadmap which has multi-layered structure using a sonar grid map when a mobile robot navigates in unexplored area. • The mobile robot path planner using the hierarchical roadmap can efficiently search for appropriate paths under the limited computing power and time by reducing the search space size.
Previous Work • Grid based representation and roadmap based representation are the two methods which represents the traversable area in the environment. • Computational complexity is the problem in grid-based planner when it is used in a large environment. • The Road-map based representation can be alternative method to deal with computational complexity in a large environment. • There are two limitations for road-map in indoor environments. • When the robot navigates in unknown areas the , the road map should be expanded or fully constructed. Most of the previous methods didn’t handle this problem to determine the expansion or reconstruction of the roadmap. • The second roadmap is induced by the property of the roadmap. The road map may fail to cover the entire traversable areas in the environment because of the irregular distribution of nodes.
Proposed related approaches • Several methods have been proposed to solve the limitations by replacing or improving random sampling . • The Gaussian sampling method , the non-uniform sampling method and the bridge test were proposed to improve coverage of the roadmap by generating more nodes in the narrow passages. • The incremental roadmap generation method and the adaptive sampling method were proposed to determine the adequate no of nodes and their arrangements. • These methods improve coverage , the roadmap still has irregular distributed nodes. • They also don't deal with the situations when a mobile robot navigates in an unexplored area
Proposed Approach • The construction of the hierarchical roadmap is achieved by the following procedures • A sonar grid map is generated using sonar data. • Subregions are incrementally extracted based on the sonar grid map. • The hierarchical roadmap is constructed using the divided subregions .
Concept of hierarchical roadmap • A region roadmap abstracts the connectivity of subregions in the environment. • A hub node is a representative of a sub roadmap. • A hub roadmap is connected with the other region nodes in the region roadmap by gate nodes. • Each sub node in the sub road map is only connected with corresponding hub node
Hierarchical Path Planning • It can reduce the no of referred nodes and edges using-layered structure. • Path planning based on hierarchical roadmap using the DNS (divide and search) approach is applied to search for the minimum cost path for a given query: • In order to Search for the minimum cost path for a given query Hierarchical roadmap uses the DNS approach and it uses the following procedure: • A topological path is searched based on the region roadmap and it consists of a list of RNs from the starting location to the goal location. • A local metric path is searched in each RN on the topological path. • A global metric path is assembled by using the topological path and the local metric path and is used to guide mobile robots travel from starting location to the goal location.
Concept of DNC approach using the hierarchical road map a) Topological path from RN A to RN C. Black lines represent the topological path. b) Local metric path in the goal RN. Yellow star is the foal location. c) Local metric path in the starting RN. Yellow star is the starting location. d) Local metric path to connect the RN A and RN C.
Implementation of the proposed method Hierarchical Roadmap Construction • Using Sonar grid map the hierarchical roadmap was constructed. • The Robot was manually guided to visit all rooms in the environment at an average speed of 0.15 m/s while collecting sonar data at a rate of 4Hz. The environment was then divided into ten subregions using incremental sub-region extraction.
The region road map -The region road was constructed based on the extracted subregions and was used as the first layer of hierarchical road map , it could abstract the connectivity Of subregions in the environment. I -In each RN of the region roadmap, the hub roadmap was constructed to abstract the traversable in the RN. - Totally 10 hub roadmaps were extracted for 10 RNs using 34 HNs and 11 GNs. -In the IInd layer the hub roadmaps were used as the IInd layer of hierarchical roadmap and each
HN was connected to the corresponding SNs to make the sub roadmap which has a hub and spoke topology. • A group of sub road maps where then used for the IIIrd layer of hierarchical roadmap. • These sub road map helps to improve the coverage . • And gives more chances to search for efficient paths for arbitrary queries. • The local road maps cover the traversable areas almost entirely
Path Planning using Hierarchical Roadmap - The travel costs of the two planning results are almost similar. - The Hierarchical roadmaps travel distance was slightly shorter than single-layer roadmap. - Hierarchical based planner searched for path in 5.32 m/s. The Hierarchical roadmaps multi layer graph structure is compared with Single-layer roadmap
Results • It efficiently abstracts traversable areas in the environment. • The construction process of the hierarchical roadmap can incrementally expand traversable areas by extracting new subregions using sonar grid maps when the mobile robot navigates unknown areas. • The path planner using the hierarchical roadmap can efficiently search for appropriate paths to answer arbitrary queries under the limited computing power and time. • The DNC approach searches for appropriate paths by reducing the search space size using the multi-layered structure of the hierarchical roadmap.
End Thanks