Download
1 / 13
130 likes | 138 Views
This document outlines the calculation and requirements for addressing vibration problems and achieving beam stability at the NSLS-II Stability Workshop. It covers the performance calculation, trim strength, feedback system, and noise limitations, among other topics.

E N D
Issues on Closed Orbit Feedback for NSLSII NSLS-II Stability Workshop April 18-20, 2007 Li-Hua Yu
Outline 1. Calculation on the performance showing vibration problem can be solved by fast feedback 2. Requirement on power supply strength
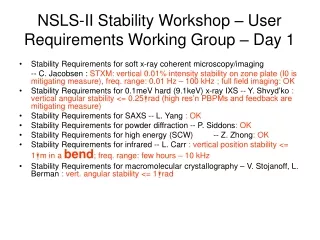
Goal Beam stability requirement based on 10% beam size The minimum beam size is 2.7 m at =1m , assuming y 0.1nm/4.
Machine model used in feedback system performance calculation for DBA30 Qx = 32.35 Qy = 16.28
Orbit feedback system calculation: BPM vibration and noise errors are included Quad strength BPM motion+noise Quad motion BPM signals without feedback BPM output signal BPM signal is used to calculate the corrector trim kick strength and the orbit movement with feedback: Beam position Trim kick strength
Response Matrix In matrix form: Frequency response of trims and vacuum chamber eddy current T(): (T(0)1)
y y R R T() t V % U f f f f e e c c V W W -G PID - - 1 1 Effect of feedback Without feedback: With feedback: • If G is a large positive number, with feedback loops on, the error signal is reduced by a factor of 1+G at DC (T(0)=1). • At higher frequency, TG is a complex number and has to be designed to avoid oscillation. • Assume all the trims have the same frequency response
s BPM Δ y position m) m) m) 14 y m m m ( ( ( y y y ) ) ) Δ Δ Δ s s s rad m m ( ( ( trim trim s 10 y 10 trim Amplification factor with and without feedback system on Assuming 1 micron random vibration of quads and BPMs Trim strength is expressed in unit of micro-radian. The calculation uses 4 correctors next to sections of stainless vacuum chamber for each half superperiod. off on Required trim strength is 1 µrad
Ratio of vertical beam motion over beam size with the feedback system on shows the stability is almost satisfied except at short straight sections it is slightly larger if quads and BPMs motion is 0.4 micron. The calculation uses 4 correctors next to sections of stainless vacuum chamber for each half superperiod y 0.1nm/4. y y Z (m) If we design the BPM support in short straight sections such that temperature change of 0.1˚C causes 0.3 motion, the beam motion will be less than10% of beam size there.
BMPs and Trims in the design after CDR BPM to be used in fast feedback system Fast trim to be used in fast feedback system
Tolerance on Vertical Trim Power Supply Resolution BPM s y Trim position Orbit motion due to trim power supply noise of 1 nrad rms (nm) (nm) y Δ s s • If we require beam motion due to the trim noise at the beam waist where y=1m is less than 0.25µm=250nm, the rms trim noise should be less than 10nrad. • The last digit should be less than 10 nrad/0.29 = 30nrad • If the maximum trim strength is 1 mrad, we need the last digit to be 30 ppm • 0.1mrad 300 ppm
Summary of Requirements • Maximum motion of quads and BPM that feedback can correct: < 0.3µm • Power Supply Specification: Frequency Strength - RMS < 5 Hz 800 μrad 20 Hz 100 μrad 100 Hz 10 μrad 1000 Hz 1 μrad Resolution of last bit: 0.01 μrad Noise Level : 0.003 urad ( ~ 4 ppm of 800 μrad • May need special BPM supports in short straight sections to reduce temperature dependence to <0.1 for 0.1˚C change. • All trims (magnet, power supply, vacuum chamber Eddy current included) required to have same frequency response with bandwidth 60-100Hz.
s BPM Δ y position off m) m) m) 17 y m m m ( ( ( y y y ) ) ) Δ Δ Δ s s s rad m m on ( ( ( trim trim s 10 y 10 trim Required trim strength is 1 µrad Specially designed BPM support at 5m straights to reduce temperature dependence Assuming 1.2 micron random motion of quads and BPMs, and assuming UBPMs in the short straight are used in the feedback to replace the BPM next to Q22 and support with invar so that the motion due to temperature change is 0.4 micron, the beam motion in the short straight is reduced to less than 0.3 micron. BPM in 5m straight