Download
1 / 21
250 likes | 491 Views
水 下传感器网络节点定位. 田志辉 2012.11.22. 水下传感器网络节点定位. 1 、传感器网络定位基本知识. 定位重要性 定位 算法 分类 计算 节点位置的基本 方法. 2 、常见的定位算法(陆地). TOA 、 AOA 、 RSSI 等. 3 、大规模水下传感器网络定位. 传感器网络定位基本知识. 定位重要性. 水下网络节点定位作用:. 标记收集到的信息 追踪水下节点 监测水下目标的位置 协调节点的运动 辅助 MAC 、路由协议设计. 没有位置信息的监测消息往往毫无意义. 定位算法分类. 信标节点. 节点. 未知节点.

E N D
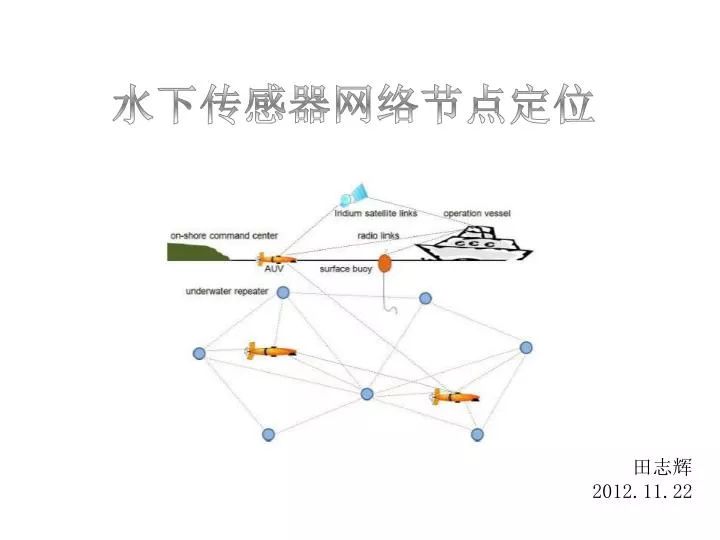
水下传感器网络节点定位 田志辉 2012.11.22
水下传感器网络节点定位 1、传感器网络定位基本知识 定位重要性 定位算法分类 计算节点位置的基本方法 2、常见的定位算法(陆地) TOA、AOA、RSSI 等 3、大规模水下传感器网络定位
传感器网络定位基本知识 定位重要性 水下网络节点定位作用: • 标记收集到的信息 • 追踪水下节点 • 监测水下目标的位置 • 协调节点的运动 • 辅助MAC、路由协议设计 没有位置信息的监测消息往往毫无意义
定位算法分类 信标节点 节点 未知节点 定位算法常见的3种分类方式 基于距离的算法:测量相邻节点间的绝对距离和方位,利用实 际距离计算位置 测量实际距离 距离无关的算法:无需测量绝对距离和方位,利用节点间的估 计距离计算位置 递增式:从信标节点开始,附近节点先定位,依次向外延伸 定位先后次序 并发式:所有节点同时进行位置计算 基于信标节点:以信标节点作为参考点,产生整体绝对坐标系统 是否使用信标节点 无信标节点:只关心相对位置,最后产生整体相对坐标系统 也可分为集中式和分布式
节点计算位置的基本方法 方法一:三边测量法
节点计算位置的基本方法 方法二:三角测量法 方法三:极大似然估计法 最小均方误差估计
常见的定位算法 基于到达时间(TOA)的定位: 方法:已知信号的传播速度,根据信号的传播时间来计算节点间距离 优点:定位精确度高 缺点:要求节点间保持精确的时间同步,对节点硬件和功耗要求较高 基于接收信号强度指示(RSSI)的定位: 方法:已知发射节点的发射信号强度,接收节点根据收到信号的强度,计 算出信号的传播损耗,利用理论和经验模型将传输损耗转化为距离 经验模型:预先建立位置和信号强度关系数据库 适合于室内、空间变动小的网络 理论模型:建立信号衰减和传播距离间的关系式 但在现实环境中,受温度、障碍物、传播模式影响大
常见的定位算法 DV-Hop算法: (距离无关) 方法:信标节点广播分组(含跳数字段),未知节点记录与信标节点的最小 跳数;信标节点根据记录的其他信标节点的位置信息和跳数,估算平 均每跳的距离,然后再广播带生存期字段分组(含每跳距离)。 优点:对节点硬件要求低,实现简单 缺点:利用平均每跳的距离代替直线距离,存在一定误差
PAPER Localization for Large-Scale Underwater Sensor Networks Zhong Zhou1, Jun-Hong Cui1, and Shengli Zhou2 1 Computer Science & Engineering Dept, University of Connecticut, Storrs, CT, USA, 06269 2 Electrical & Computer Engineering Dept, University of Connecticut, Storrs, CT, USA, 06269 {zhong.zhou,jcui,shengli}@engr.uconn.edu
此算法融合以下两种算法: 三维空间欧氏距离估计算法(3-Dimensional Euclidean Distance Estimation) 循环定位估算(Recursive Location Estimation) • 浮标 • 锚节点(信标节点) • 普通节点(未知节点)
3-Dimensional Euclidean Distance Estimation A为锚节点,BCD均是E点的邻居节点已知ABC三点坐标 • 已知距离: • CA, BA, BC, • EB, ED, EC, • DB, DC, DA 求AE节点间距离? D点可能位置有2个 相应E点位置则会有4个 注:ABCD四点不能共面,ABCDE任意三点不能共线
Recursive Location Estimation 定位误差 计算公式: 其中u,v,w为未知节点的估计坐标,xi,yi,zi是参考节点i的坐标, li为未知节点与参考节点i之间的测量距离(可由TOA获得)。 节点1可由锚节点ABCD实现 定位,然后计算定位误差。 误差小:成为新的参考节点, 广播自己的位置信息 误差大:不能视为参考节点
信任度因子 由下式决定 设一特定值为信任度门限 若 > ,则认为此节点可以充当参考节点; 反之,则仍然认为此节点位置未知。 未知节点根据信任度因子决定定位所需的4个参考节点。
算法流程图 参考节点:周期性地广播定位信息:自身坐标、 节点ID和信任度 未知节点: 计数器m:记录自身已知距离的参考节点的数目 计数器n: 记录定位信息包的广播次数 定位信息包:交换信息 信息 信标信息包:测距 N:定位信息包门限,每个节点能 发送定位信息的最大次数
定位过程中,未知节点不停地检查计数器m • m<4:广播定位信息包,含以下信息: • 接收到的参考节点的位置 • 自身与参考节点的距离 • 自身与一跳相邻节点间的距离 • 距离估算,更新m值 m>=4:选择4个信任度因子最大的参 考节点进行定位
性能分析 仿真实验环境设置 实验:500个传感器节点随机分布在三维空间100*100*100区域内 假定使用通常的方法,可以使得测量距离与真实距离间误差在1%以内 节点容量:节点所期望拥有的邻居节点数,可以通过控制节点通信半径进行改变,表征节点的连通性需求。 仿真结果将与欧氏距离算法和循环定位算法作对比 仿真分为三种情况:锚节点占总节点数比例为5%、10%、20%。 性能参数包括: (1)定位覆盖率:能定位的节点数占总节点数的百分比 (2)定位误差:所有节点的估计位置与实际位置平均的相差距离 (3)平均通信损耗:所有已定位节点发送的信息包总数(包括信标信息和定位信息)
性能分析 定位覆盖率 红色:论文算法 蓝色:循环算法 黑色:欧式算法 本地算法比其余两种算法的覆盖范围要高出很多 结论:想要提高覆盖率,可以选择增多锚节点
性能分析 定位误差 红色:论文算法 蓝色:循环算法 黑色:欧式算法 结论:1、在实际应用中,我们不能简单地依靠改变节点容量来减小误差 2、锚节点比例的增加可以有效地降低定位误差
性能分析 平均通信损耗 红色:论文算法 蓝色:循环算法 黑色:欧式算法 欧式算法的通信损耗相对较大 在循环定位算法中,只须已定位的参考节点广播信息包,未知节点不发送信息, 因此算法的通信损耗很小。 随着节点容量的增加,论文算法平均通信损耗也越来越接近循环算法
讨论 在三维水下传感器网络中,锚节点比例为20%,节点容量为12-13,算法可以 实现成功定位95%的节点,定位误差在5%以下。 苛刻的要求:连通性需求为12左右 解决方案:区分传感器节点的定位阶段和正常通信阶段 参数权衡 信任度门限:增大信任度门限,定位覆盖率和定位误差都会 降低,而通信损耗会增大 定位信息门限N:设计传感器网络时,有一特定门限值(网络固有属性) 当N小于这个值时,定位覆盖率、定位误差和平均通信损耗都会随N的增大迅速上升;当N大于这个值时,定位覆盖率和定位误差相对稳定,但通信损耗会继续增大。 移动网络:节点的移动性不会给定位覆盖率和通信损耗带来挺大影响, 但定位误差会显著地增大
