Download
1 / 1
10 likes | 125 Views
Intentional binding with a robotic hand To what extent agency is modulated by embodiment?. Introduction.

E N D
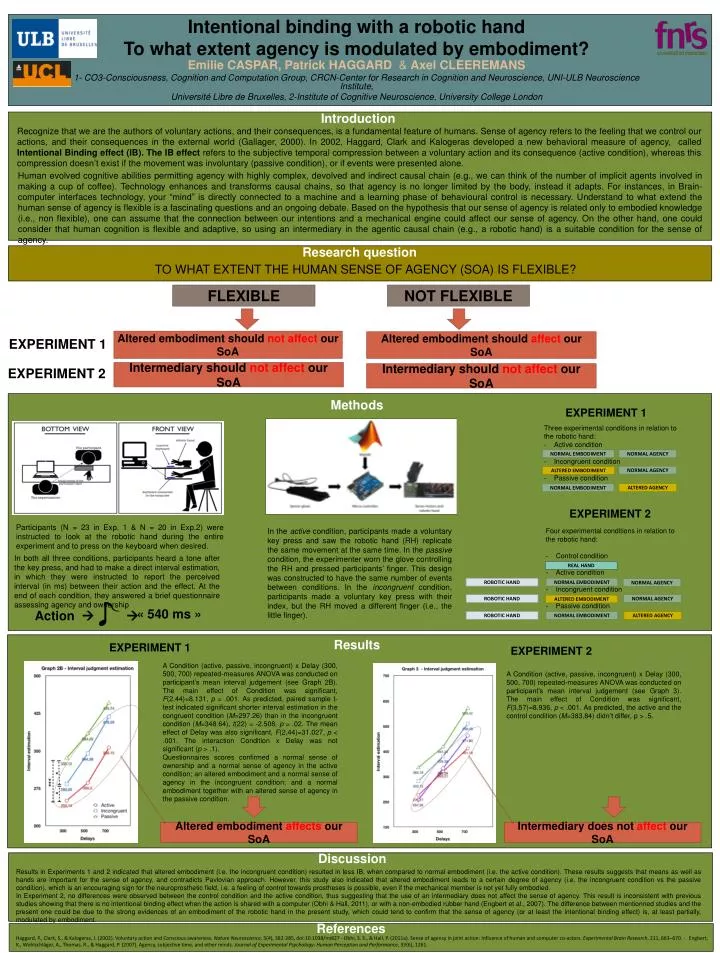
Intentional binding with a robotic hand To what extent agency is modulated by embodiment? Introduction Recognize that we are the authors of voluntary actions, and their consequences, is a fundamental feature of humans.Sense of agency refers to the feeling that we control our actions, and their consequences in the external world (Gallager, 2000). In 2002, Haggard, Clark and Kalogeras developed a new behavioral measure of agency, calledIntentional Binding effect (IB). The IB effect refers to the subjective temporal compression between a voluntary action and its consequence (active condition), whereas this compression doesn’t exist if the movement was involuntary (passive condition), or if events were presented alone. Human evolved cognitive abilities permitting agency with highly complex, devolved and indirect causal chain (e.g., we can think of the number of implicit agents involved in making a cup of coffee). Technology enhances and transforms causal chains, so that agency is no longer limited by the body, instead it adapts. For instances, in Brain-computer interfaces technology, your “mind” is directly connected to a machine and a learning phase of behavioural control is necessary. Understand to what extend the human sense of agency is flexible is a fascinating questions and an ongoing debate. Based on the hypothesis that our sense of agency is related only to embodied knowledge (i.e., non flexible), one can assume that the connection between our intentions and a mechanical engine could affect our sense of agency. On the other hand, one could consider that human cognition is flexible and adaptive, so using an intermediary in the agentic causal chain (e.g., a robotic hand) is a suitable condition for the sense of agency. Research question TO WHAT EXTENT THE HUMAN SENSE OF AGENCY (SOA) IS FLEXIBLE? FLEXIBLE NOT FLEXIBLE Alteredembodimentshouldnot affect our SoA Alteredembodimentshouldaffectour SoA EXPERIMENT 1 Intermediaryshouldnot affect our SoA Intermediaryshouldnot affect our SoA EXPERIMENT 2 Methods EXPERIMENT 1 • Three experimental conditions in relation to the robotic hand: • Active condition • Incongruent condition • Passive condition NORMAL EMBODIMENT NORMAL AGENCY NORMAL AGENCY ALTERED EMBODIMENT ALTERED AGENCY NORMAL EMBODIMENT EXPERIMENT 2 Participants (N = 23 in Exp. 1 & N = 20 in Exp.2) were instructed to look at the robotic hand during the entire experiment and to press on the keyboard when desired. In the active condition,participants made a voluntary key press and saw the robotic hand (RH) replicate the same movement at the same time. In the passive condition, the experimenter worn the glove controlling the RH and pressed participants’ finger. This design was constructed to have the same number of events between conditions. In the incongruent condition, participants made a voluntary key press with their index, but the RH moved a different finger (i.e., the little finger). • Four experimental conditions in relation to the robotic hand: • Control condition • Active condition • Incongruent condition • Passive condition Emilie CASPAR, Patrick HAGGARD& Axel CLEEREMANS 1- CO3-Consciousness, Cognition and Computation Group, CRCN-Center for Research in Cognition and Neuroscience, UNI-ULB Neuroscience Institute, UniversitéLibre de Bruxelles, 2-Institute of Cognitive Neuroscience, University College London In both all three conditions, participants heard a tone after the key press, and had to make a direct interval estimation, in which they were instructed to report the perceived interval (in ms) between their action and the effect.At the end of each condition, they answered a brief questionnaire assessing agency and ownership REAL HAND ROBOTIC HAND NORMAL EMBODIMENT NORMAL AGENCY ROBOTIC HAND NORMAL AGENCY ALTERED EMBODIMENT « 540 ms » Action ROBOTIC HAND NORMAL EMBODIMENT ALTERED AGENCY Results EXPERIMENT 1 EXPERIMENT 2 A Condition (active, passive, incongruent) x Delay (300, 500, 700) repeated-measures ANOVA was conducted on participant’s mean interval judgement (see Graph 2B). The main effect of Condition was significant, F(2,44)=8.131, p = .001. As predicted, paired sample t-test indicated significant shorter interval estimation in the congruent condition (M=297.26) than in the incongruent condition (M=348.64), t(22) = -2.508, p = .02. The mean effect of Delay was also significant, F(2,44)=31.027, p < .001. The interaction Condition x Delay was not significant (p > .1). Questionnaires scores confirmed a normal sense of ownership and a normal sense of agency in the active condition; an altered embodiment and a normal sense of agency in the incongruent condition; and a normal embodiment together with an altered sense of agency in the passive condition. A Condition (active, passive, incongruent) x Delay (300, 500, 700) repeated-measures ANOVA was conducted on participant’s mean interval judgement (see Graph 3). The main effect of Condition was significant, F(3,57)=8.936, p < .001. As predicted, the active and the control condition (M=383,84) didn’t differ, p > .5. Alteredembodimentaffects our SoA Intermediarydoes not affect our SoA Discussion Results in Experiments 1 and 2 indicated that altered embodiment (i.e. the incongruent condition) resulted in less IB, when compared to normal embodiment (i.e. the active condition). These results suggests that means as well as hands are important for the sense of agency, and contradicts Pavlovian approach. However, this study also indicated that altered embodiment leads to a certain degree of agency (i.e. the incongruent condition vs the passive condition), which is an encouraging sign for the neuroprosthetic field, i.e. a feeling of control towards prostheses is possible, even if the mechanical member is not yet fully embodied. In Experiment 2, no differences were observed between the control condition and the active condition, thus suggesting that the use of an intermediary does not affect the sense of agency. This result is inconsistent with previous studies showing that there is no intentional binding effect when the action is shared with a computer (Obhi & Hall, 2011), or with a non-embodied rubber hand (Engbert et al., 2007). The difference between mentionned studies and the present one could be due to the strong evidences of an embodiment of the robotic hand in the present study, which could tend to confirm that the sense of agency (or at least the intentional binding effect) is, at least partially, modulated by embodiment. References • Haggard, P., Clark, S., & Kalogeras, J. (2002). Voluntary action and Conscious awareness. Nature Neuroscience, 5(4), 382-385, doi:10.1038/nn827 - Obhi, S. S., & Hall, P. (2011a). Sense of agency in joint action: Influence of human and computer co-actors. Experimental Brain Research, 211, 663–670.- Engbert, K., Wohlschläger, A., Thomas, R., & Haggard, P. (2007). Agency, subjective time, and other minds. Journal of Experimental Psychology: Human Perception and Performance, 33(6), 1261.