Download
1 / 47
470 likes | 649 Views
Jeremy Schiff EECS Department University of California, Berkeley Ken Goldberg IEOR and EECS Departments University of California, Berkeley http://www.cs.berkeley.edu/~jschiff Supported by NSF Grants: 0424422/0535218.

E N D
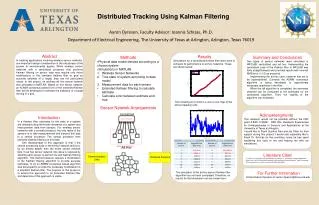
Jeremy Schiff • EECS Department • University of California, Berkeley • Ken Goldberg • IEOR and EECS Departments • University of California, Berkeley http://www.cs.berkeley.edu/~jschiff • Supported by NSF Grants: 0424422/0535218 Automated Intruder Tracking using Particle Filtering and a Network of Binary Motion Sensors
Outline • Introduction • Related Work • Problem Formulation • Setup and Assumptions • Particle Filtering • Results • Simulation • Experimental • Conclusion/Future Work
Motivation • New class of technologies due to 9/11 • Automated Security • Wireless Sensor Networks • X10 PIR sensors - $25 • Robotic Webcams • Pan, Tilt, Zoom • 500 Mpixels/Steradian • Increased computer processing speeds • Enables Realtime Applications
Goal and Approach • Wish to secure an environment • Low Cost Binary Sensors • X10 ~ $25 • Optical Beam • Floor Pad • Manufactured in China • Noisy triggering pattern • Refraction • Use sensor triggering patterns to accurately localize an intruder
Intuition • Utilize Sensor Overlap Information
Intuition • Utilize Sensor Overlap Information
Outline • Introduction • Related Work • Problem Formulation • Setup and Assumptions • Particle Filtering • Experiments • Simulation • Real-world • Conclusion/Future Work
Related Work • Pursuer/Evader Games • Using line-of sight optical sensors • [Isler, Kannan, Khanna 2004] • Tracking Multiple Intruders • [Oh, Sastry 2005] • Tracking Worn Devices • Track Infrared Beacon • [Shen et al. 2004] • Dynamic Shipment Planning using RFIDs • [Kim et al. 2005]
Related Work II • Video Tracking Systems • [Micilotta and Bowden 2004] • Multiple Classes of Sensors • Multiple exclusive modes • [Cochran, Sinno, Clausen 1999] • Fuse data of multiple sensor types • [Jeffery et al. 2005] • Automated Camera Control • [Song et al. 2005] Virtual Devices Physical Devices
Related Work III • Probabilistic Tracking Approaches • Kalman Filtering • [Kalman 1960] • Extended Kalman Filtering • [Lefebvre, Bruyninckx, De Schutter 2004] • Particle Filtering • Book: [Thrun, Burgard, Fox 2005] • [Arulampalam et al. 2002]
Related Work IV • Multiple humans controlling a camera • [Song and Goldberg 2003] • [Song, Goldberg and Pashkevich 2003] • Panorama Generation • [Song et al. 2005] • Art Gallery Problem • [Shermer 1990] • [Urrutia 2000]
Outline • Introduction • Related Work • Problem Formulation • Setup and Assumptions • Particle Filtering • Experiments • Simulation • Real-world • Conclusion/Future Work
Room Geometry List of nodes and edges Discretize space Discretize time Setup and Assumptions
Intruder occupied world-space cell j in iteration Sensor i triggered during iteration Sensor i experienced refraction period in iteration Setup and Assumptions II
Setup and Assumptions III • Three Conditional Distributions • Trigger while experiencing refraction • Trigger from intruder • Trigger from no intruder
Output • Estimated intruder location • Objective: • Minimize error between ground truth and estimation.
Characterization • Per sensor type • Grid over sensor space • Determine • Refraction period • False Negative Rate • False Positive Rate
Deployment • Convert to world-space • Overlay grid • Transformed point to Cells
Deployment II • Determine potential non-zero characterization cells via convex hull • Inverse Distance Weighting • Interpolation according to distance • Determines values for cells without readings inside convex hull
Particle filters • Non-Parametric • Sample Based Method (Particles) • Particle Density ~ Likelihood • Tracking requires three distributions • Initialization Distribution • Transition Model (Intruder Model) • Observation Model • Determines
Intruder Model • State • Position, Orientation, Speed, and Refracting Sensors • Euler Integration for position • Gaussian Random Walk for new speed and orientation • Orientation change inversely proportional to speed • Deterministic refraction periods • Rejection Sampling to enforce room geometry
Intruder Model II • Time between iterations: • Empirically determined constants:
Intruder Model - Example Example state at iteration 0
Intruder Model - Example Accepted state for iteration 1
Intruder Model - Example Example state at iteration 1
Intruder Model - Example Accepted state for iteration 2
Intruder Model - Example Example state at iteration 2
Intruder Model - Example Rejected state for iteration 2
Intruder Model - Example Example state at iteration 2
Intruder Model - Example Rejected state for iteration 2
Intruder Model - Example Example state at iteration 2
Intruder Model - Example Accepted state for iteration 2
Sensor Model • Evidence is vector of which sensors are triggering • Triggering of sensors independent given intruder state implies • If sensor refracting • Otherwise
Outline • Introduction • Related Work • Problem Formulation • Setup and Assumptions • Particle Filtering • Experiments • Simulation • Real-world • Conclusion/Future Work
22 Optical Beams Perfect Optimal Performance 14 Triangular Motion Sensor Perfect & Imperfect Simulation Setup
Simulation Results • Example Path • Ground Truth • Red Circles • Estimations • Grey Circles
P(E) P(E) Error E Error E Simulation Results II • Baseline Estimate • Perfect Optical-Beam Sensors
P(E) P(E) Error E Error E Simulation Results III • Perfect Triangular Motion Sensors • Imperfect Triangular Motion Sensors
Error E P(E) Time (Seconds) Error E Simulation Results IV • Error over Time – 4 Sec. Refraction, Imperfect Sensors • Density - 8 Sec. Refraction, Imperfect Sensors
In-Lab Results • 8 Passive Infrared Sensors • X10 • 8 second refraction time • Room 8x6 meters • .3 m /Cell dimension • Sampled every 2 seconds • 1000 Particles
Outline • Introduction • Related Work • Problem Formulation • Setup and Assumptions • Particle Filtering • Results • Simulation • Experimental • Conclusion/Future Work
Conclusions • Real-time Tracking System • Binary Sensors with Refraction Period • Particle Filtering for Sensor Fusion • Conditional Probability Models • Models • Intruder Velocity • Room Geometry • Sensor Characterization
Future Work • Effects of varying different components • Number Particles • Types of sensors • Spatial arrangements of sensors • Multiple intruders • Decentralize • Vision Processing • Other applications • Warehouse Tracking
Thank You • Jeremy Schiff: jschiff@cs.berkeley.edu • Ken Goldberg: goldberg@ieor.berkeley.edu • URL: www.cs.berkeley.edu/~jschiff