Download
1 / 2
30 likes | 222 Views
Group 6: Micro Autonomous UAV. This project’s goal is to design a low-cost autonomous UAV control system for use in a small to micro sized aircraft. UAVs are rapidly growing in popularity in military, government, commercial, and civilian sectors.

E N D
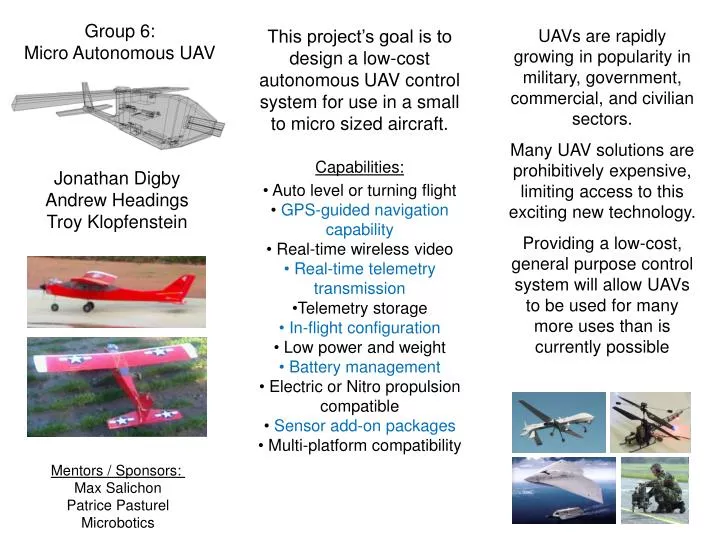
Group 6: Micro Autonomous UAV This project’s goal is to design a low-cost autonomous UAV control system for use in a small to micro sized aircraft. UAVs are rapidly growing in popularity in military, government, commercial, and civilian sectors. Many UAV solutions are prohibitively expensive, limiting access to this exciting new technology. Providing a low-cost, general purpose control system will allow UAVs to be used for many more uses than is currently possible • Capabilities: • Auto level or turning flight • GPS-guided navigation capability • Real-time wireless video • Real-time telemetry transmission • Telemetry storage • In-flight configuration • Low power and weight • Battery management • Electric or Nitro propulsion compatible • Sensor add-on packages • Multi-platform compatibility Jonathan Digby Andrew Headings Troy Klopfenstein Mentors / Sponsors: Max Salichon Patrice Pasturel Microbotics
Technical specifications: Processor(s): Dual dsPIC33F DSP microcontrollers Sensor Package: Microbotics MIDG II Inertial Navigation System with GPS Camera: Mini 350 LOR color camera with 434 MHz transmitter (2500 ft range) Memory: 1 MB EEPROM storage (telemetry, waypoints, settings) Mechanical: Standard hobby servos (PWM controlled) for rudder, elevator, aileron, throttle, and other Control: Standard hobby 72.x transmitter/receiver pair, 7 channel (2 channels free) • Future Improvements: • Autonomous takeoff and landing • Autonomous dead-stick landings • Heavy weather handling • Extremely long-range wireless • Articulated camera Check us out online for more information: www.tinyurl.com/OSUUAV Team Members: Jonathan Digby digbyj@onid.orst.edu • SWARM communication • Emergency beacon • Overwater / long-duration flight planning Andrew Headings headinga@onid.orst.edu Troy Klopfenstein klopfent@onid.orst.edu Microbotics MIDG II