Download
1 / 27
270 likes | 378 Views
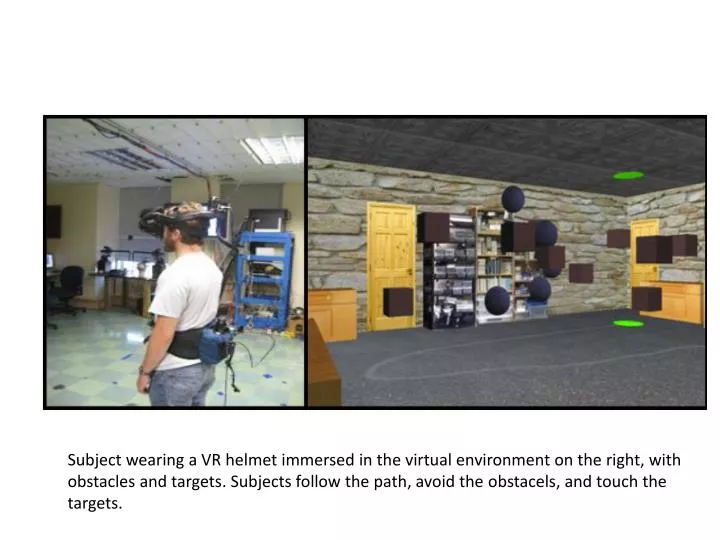
Subject wearing a VR helmet immersed in the virtual environment on the right, with o bstacles and targets. Subjects follow the path, avoid the obstacels , and touch the t argets. Top down view of the experiment. A sequence of fixations are shown, directed at the

E N D
Subject wearing a VR helmet immersed in the virtual environment on the right, with obstacles and targets. Subjects follow the path, avoid the obstacels, and touch the targets.
Top down view of the experiment. A sequence of fixations are shown, directed at the path (green), obstacles (red), and targets. The subject’s path is shown by the thin red line and shows two instances of avoidance of an obstacle (pink). In both cases avoidance occurs while the S is fixating the next target (blue).
General question: How is vision used when walking? How far away is the subject when the obstacle is fixated? (Choose the end of the fixation.) 2. Does this distance very for chairs vs people vs bins? Why? 3. Are some obstacles not fixated at all? Why? 4. What location on the obstacle is fixated? Eg is it the edge closest to the body? 5. Is there any change in gaze behavior as the path becomes more familiar? Why?
Where do we look when we walk? Why do we look there? • Suppose that complex behavior can be broken down into simpler sub-tasks. • What sub-tasks can be identified when walking? • - Control heading • - Avoid obstacles • - Update location • Remember surroundings • Can we identify the function of the fixations made while walking? • Each sub-task can be accomplished either by bottom up capture of attention or • by top down search for relevant visual information. • The top down factors reflect learning. • In this lab we would like to: • Describe gaze behavior as a first step to understanding how vision is used. • See if we can find evidence for learning where obstacles are. Such learning is • critical for top down control.
Looming – a potential bottom up cue that attracts gaze Neurons in Area MT sensitive to looming stimuli.
Neural Circuitry for Saccades target selection Motion sensitive area MT saccade decision saccade command inhibits SC Substantianigra pc (Dopamine) signals to muscles
Optic Flow might be used for controlling heading direction. This is commonly thought to be a bottom up mechanism.
How Gaze Patterns are Learned Neuroeconomics
Learning to Adjust Gaze • Changes in fixation behavior fairly fast, happen over 4-5 encounters (Fixations on Rogue get longer, on Safe shorter)
Shorter Latencies for Rogue Fixations • Rogues are fixated earlier after they appear in the field of view. This change is also rapid.
Neural Substrate for Learning Neurons at all levels of saccadic eye movement circuitry are sensitive to reward. Neurons in substantia nigra pc in basal ganglia release dopamine. These neurons signal expected reward. This provides the neural basis for learning gaze patterns in natural behavior, and for modeling these processes using Reinforcement Learning.
Neural Circuitry for Saccades planning movements target selection saccade decision saccade command inhibits SC Substantia nigra pc signals to muscles Substantia nigra pc modulates caudate
Neurons at all levels of saccadic eye movement circuitry are sensitive to reward. LIP: lateral intra-parietal cortex. Neurons involved in initiating a saccade to a particular location have a bigger response if reward is bigger or more likely SEF: supplementary eye fields FEF: frontal eye fields Caudate nucleus in basal ganglia
This provides the neural basis for learning gaze patterns in natural behavior, and for modeling these processes using Reinforcement Learning. (eg Sprague, Ballard, Robinson, 2007)
Modelling Natural Behavior in Virtual Environments. Virtual environments allow direct comparison of human behavior and model predictions in the same natural context. Use Reinforcement Learning models with an embodied agent acting in the virtual environment.
Modelling behaviors using virtual agents Sprague, Ballard, Robinson, 2007; Rothkopf ,2008 Assume behavior composed of a set of sub-tasks
Model agent after learning Pickup litter Follow walkway Avoid obstacles
Controlling the Sequence of fixations Choose the task that reduces uncertainty of reward the most obs can side
Avatar path Human path Reward weights estimated from human behavior.
Detection of signs at intersection results from frequent looks. Shinoda et al. (2001) “Follow the car.” or “Follow the car and obey traffic rules.” Time fixating Intersection. Road Car Roadside Intersection
How well do human subjects detect unexpected events? Shinoda et al. (2001) Detection of briefly presented Stop signs. Intersection P = 1.0 Mid-block P = 0.3 Greater probability of detection in probable locations Suggests Ss learn where to attend/look.