Download
1 / 27
270 likes | 481 Views
Pulley System GUI Familiarity Level Required: Lower Estimated Time Required: 40 minutes. MSC.ADAMS 2005 r2. Topics Covered. In this tutorial you will learn how to:. Create a cylinder Create a box Create a sphere Add a fixed joint Add a translational joint Add a inplane primitive joint

E N D
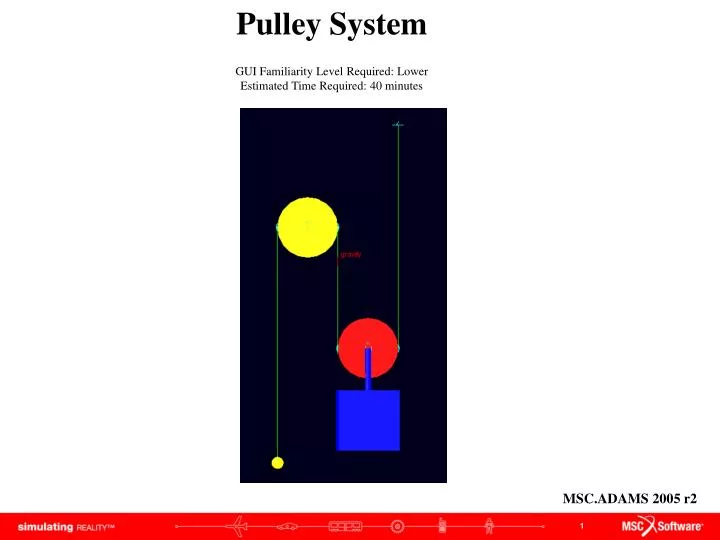
Pulley System GUI Familiarity Level Required: Lower Estimated Time Required: 40 minutes MSC.ADAMS 2005 r2
Topics Covered In this tutorial you will learn how to: • Create a cylinder • Create a box • Create a sphere • Add a fixed joint • Add a translational joint • Add a inplane primitive joint • Add a translational motion If you have any difficulties, import the “Pulley_System_shortcut_1.cmd” file and proceed from pg 13 If you have any difficulties, import the “Pulley_System_shortcut_2.cmd” file and proceed from pg 16 If you have any difficulties, import the “Pulley_System_shortcut_3.cmd” file and proceed from pg 19 If you have any difficulties, import the “Pulley_System_complete.cmd” file and proceed from pg 24
Pulley System Problem Create a pulley system
What You Should Accomplish When you complete this tutorial you will have a fully functional pulley system
Getting Started Getting Started: a. Under the heading "How would you like to proceed", select the Create a new model radio button. b. Choose a Location to save your files c. Set Model Name as Pulley_System d. Verify the Gravity text field is set to Earth Normal (-Global Y). e. Verify that the Units text field is set to MKS - m,kg,N,s,deg. f. Select OK. a b c d e f
Create Pulley • Click View menu, select Coordinate Window • Select Cylinder from Rigid Body tool stack • Turn on Length checkbox, enter (0.1m) in the text field • Turn on Radius checkbox, enter (0.5m) in the text field • Click (-0.5, 0.5, 0.0) • Click (-0.4, 0.5, 0.0) b a c e f d
Rename Part • Right click on the cylinder, select Part:PART_2 Rename • Enter .Pulley_System.Pulley_1 in New Name text field • Click OK b c a
Modify Pulley • Right click on the cylinder, select Marker:MARKER_1 Modify • Enter -0.5, 0.5, 5.0E-002 in Location text field • Enter 180.0, 180.0, 0.0 in Orientation text field • Click OK b a c d
Add Fixed Joint • Select Fixed joint from Joint tool stack • Select 1 Location from Construction pull down menu • Click Pulley_1.MARKER_1 a c b
Create Second Pulley • Create a second cylinder (Length = 0.1m, Radius = 0.5m) from point (0.5, -1.5, 0) to (0.6, -1.5, 0) • Rename .Pulley_System.Pulley_2 • Modify MARKER_2 (Location = 0.5, -1.5, 5.0E-002, Orientation = 180.0, 180.0, 0.0)
Create Rope a d b c e • Click Cylinder tool • Turn on Length checkbox, enter (2.1meter) in text field • Turn on Radius checkbox, enter (2.5E-003m) in text field • Click (0, 0.5, 0) • Click in the negative Y-direction • Rename .Pulley_System.Rope_2
Add Translational Joint • Select Translational joint from Joint tool stack • Click Pulley_2 Rope_2 (0, -1.5, 0) (0, -1.7, 0) • Click Pulley_1 Rope_2 (0, 0.5, 0) (0, 0.1, 0) a c b
Create Box • Select Box from Rigid Body tool stack • Turn on Length checkbox, enter (1m) in text field • Turn on Height checkbox, enter (1m) in text field • Turn on Depth checkbox, enter (1m) in text field • Click (0, -3.2, 0) a b c d e
Modify Box • Right-click on the box, select Marker:MARKER_10 Modify • Enter 0.0, -3.2, -0.5 in the Location text field • Click OK • Rename .Pulley_System.Box b a c
Connect Box to Pulley • Click Cylinder tool • Select Add to Part from Cylinder pull down menu • Turn on Length checkbox, enter (1.2m) in text field • Turn on Radius checkbox, enter (0.5m) in text field • Click Box Box.cm Pulley_2.MARKER_4 • Select Fixed joint from joint stack • Select 1 Location from Construction pull down menu • Click Pulley_2.MARKER_4 a h f e b c g d
Create Rope • Click Cylinder tool • Turn on Length checkbox, enter (3.7m) in text field • Turn on Radius checkbox, enter (2.5E-003m) in text field • Click (1, -1.5, 0) • Click in the positive Y-direction • Rename .Pulley_System.Rope_1 a e b c d
Add Inplane Primitive Joint • Select Pallete from Joint tool stack • Click inplane primitive joint • Select 1 Location – Bodies impl. from Construction pull down menu • Click (1.0, 2.2, 0.0) d b a c
Modify Inplane Primitive Joint • Right click inplane primitive joint, select Primitive_Joint: JPRIM_1 Modify • Click change position button • Enter: • Click OK • Click OK a c d b e
Create Rope • Click Cylinder tool • Turn on Length checkbox, enter (3.7m) in text field • Turn on Radius checkbox, enter (2.5E-003m) in text field • Click (1, 0.5, 0) • Click in the negative Y-direction • Rename .Pulley_System.Rope_3 a d b c e
Create Ball • Select Sphere from rigid Body tool stack • Turn on Radius checkbox, enter (5cm) in text field • Click Rope_3.CYLINDER_7.E1 • Rename .Pulley_System.Ball a b c
Add Translational Joint and Inplane Primitive Joint • Add a Translational joint between Ball and ground at point Rope_3.MARKER_36 in negative Y-direction • Create a inplane primitive joint between Ball and Rope_3 at point Rope_3.MARKER_36 • Modify inplane primitive joint position: c a b
Add Translational Motion • Select Translation joint motion from Motion Driver tool stack • Enter 0.1 in Speed text field • Click JOINT_7 a c b
Create Coupler Joint • Select Coupler joint from Joint tool stack • Click JOINT_6 • Click JOINT_3 • Select Coupler joint • Click JOINT_2 • Click JOINT_5 a c b e f
Verify Your Model Verify your model, should have 0 degrees of freedom and no redundant constraints Run simulation (Duration = 20, Step Size = 0.1)
Model This is what your screen should look like when your model is complete
Topics Covered In this tutorial you will learn how to: • Create a cylinder • Create a box • Create a sphere • Add a fixed joint • Add a translational joint • Add a inplane primitive joint • Add a translational motion
Best Practices • Check part locations • Check orientation of the parts to make sure they are correct. • Make sure the translational joints are in the right direction • Make sure translational joint motion is correct • Make sure inplane primitive joints are correctly positioned • Check locations of spline points to make sure they are correct. • Verify your model.