Download
1 / 1
10 likes | 171 Views
Observer Based Control of Decentralized Networked Control Systems Ahmed M. Elmahdi, Ahmad F. Taha School of Electrical and Computer Engineering, Purdue University, West Lafayette, Indiana. Abstract. Problem Formulation. DNCS Configuration. A Bound on the Perturbation.

E N D
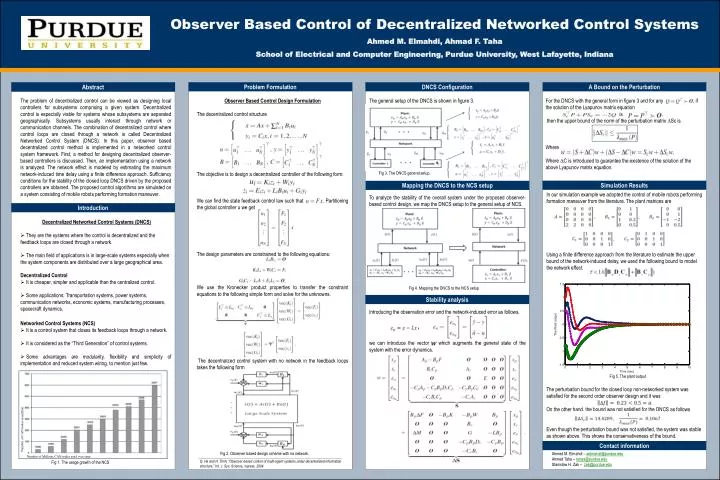
Observer Based Control of Decentralized Networked Control Systems Ahmed M. Elmahdi, Ahmad F. Taha School of Electrical and Computer Engineering, Purdue University, West Lafayette, Indiana Abstract Problem Formulation DNCS Configuration A Bound on the Perturbation The problem of decentralized control can be viewed as designing local controllers for subsystems comprising a given system. Decentralized control is especially viable for systems whose subsystems are separated geographically. Subsystems usually interact through network or communication channels. The combination of decentralized control where control loops are closed through a network is called Decentralized Networked Control System (DNCS). In this paper, observer based decentralized control method is implemented in a networked control system framework. First, a method for designing decentralized observer-based controllers is discussed. Then, an implementation using a network is analyzed. The network effect is modeled by estimating the maximum network-induced time delay using a finite difference approach. Sufficiency conditions for the stability of the closed loop DNCS driven by the proposed controllers are obtained. The proposed control algorithms are simulated on a system consisting of mobile robots performing formation maneuver. Decentralized Networked Control Systems (DNCS) • They are the systems where the control is decentralized and the feedback loops are closed through a network. • The main field of applications is in large-scale systems especially when the system components are distributed over a large geographical area. Decentralized Control • It is cheaper, simpler and applicable than the centralized control. • Some applications: Transportation systems, power systems, communication networks, economic systems, manufacturing processes, spacecraft dynamics. Networked Control Systems (NCS) • It is a control system that closes its feedback loops through a network. • It is considered as the “Third Generation” of control systems. • Some advantages are modularity, flexibility and simplicity of implementation and reduced system wiring, to mention just few. Observer Based Control Design Formulation The decentralized control structure The objective is to design a decentralized controller of the following form: We can find the state feedback control law such that . Partitioning the global controller u we get The design parameters are constrained to the following equations: We use the Kronecker product properties to transfer the constraint equations to the following simple form and solve for the unknowns. The decentralized control system with no network in the feedback loops takes the following form The general setup of the DNCS is shown in figure 3. For the DNCS with the general form in figure 3 and for any if the solution of the Lyapunov matrix equation is , then the upper bound of the norm of the perturbation matrix ∆Sc is Where Where ∆C is introduced to guarantee the existence of the solution of the above Lyapunov matrix equation. N Fig 3. The DNCS general setup. Simulation Results Mapping the DNCS to the NCS setup In our simulation example we adopted the control of mobile robots performing formation maneuver from the literature. The plant matrices are Using a finite difference approach from the literature to estimate the upper bound of the network-induced delay, we used the following bound to model the network effect. To analyze the stability of the overall system under the proposed observer-based control design, we map the DNCS setup to the general setup of NCS. Introduction Fig 4. Mapping the DNCS to the NCS setup Stability analysis Introducing the observation error and the network-induced error as follows, , we can introduce the vector which augments the general state of the system with the error dynamics. Fig 5. The plant output The perturbation bound for the closed loop non-networked system was satisfied for the second order observer design and it was On the other hand, the bound was not satisfied for the DNCS as follows Even though the perturbation bound was not satisfied, the system was stable as shown above. This shows the conservativeness of the bound. Number of CAN nodes in million Contact information Fig 2. Observer based design scheme with no network. Ahmed M. Elmahdi – aelmahdi@purdue.edu Ahmed Taha – tahaa@purdue.edu Stanislaw H. Zak – zak@purdue.edu Number of Millions CAN nodes used over time Q. Ha and H. Trinh, ”Observer-based control of multi-agent systems under decentralized information structure,” Int. J. Sys. Science, inpress, 2004. Fig 1. The usage growth of the NCS